
【人工智能与机器人研究】一种库坝系统水下成像探查有缆机器人系统设计模式
本文提出库坝系统水下成像探查有缆机器人系统(CRS-UII)设计模式,通过模块化硬件架构和协同算法体系实现高效水下检测。系统采用三层架构设计,集成成像、推进、感知等模块,配合复合脐带缆实现稳定作业。算法层包含图像处理、运动控制和缺陷识别全链路处理体系,应用层具备智能交互与任务规划功能。该系统可提升库坝水下结构检测效率与精度,为安全监测提供技术支持。研究获国家及江西省自然科学基金资助。
导读:
库坝系统是由水库与坝体构成的综合水利设施,是兼具水资源调控、防洪减灾与水电能源供应功能的核心枢纽工程,其涵盖坝体、防洪堤防、水电站厂房、闸门等关键水工结构。这些结构长期受水流冲击、水质侵蚀等影响,易出现结构损毁、漏水等问题。为解决传统人工探查效率低、风险高等问题,本文提出一种库坝系统水下成像探查有缆机器人系统(简称:CRS-UII)设计模式及实现方案。该模式以有缆机器人为载体,集成光学成像与环境感知设备,通过硬件架构与协同化软件算法,实现对水下结构多类型异常的有效探查,为库坝系统水下多场景探查机器人的研发提供通用性的参考设计框架。
作者信息:
樊棠怀:南昌理工学院电子与信息学院,江西 南昌;江西水利电力大学信息工程学院,江西 南昌;樊飞燕:江西水利电力大学信息工程学院,江西 南昌;程晓玲, 罗中华:南昌理工学院电子与信息学院,江西 南昌;沈克永:南昌理工学院计算机信息工程学院,江西 南昌
原文链接:
https://doi.org/10.12677/airr.2025.145112
论文详情
本文基于库坝系统水下探查的实际需求,结合有缆机器人技术特点,提出一套完整的系统设计模式,涵盖总体架构、硬件模块、算法体系和应用层功能等方面,旨在为相关机器人系统的研发提供规范化设计参考方案。
系统总体架构设计
库坝系统水下成像探查有缆机器人系统(CRS-UII)采用“物理层–算法层–应用层”的三层架构(如图1所示)设计。
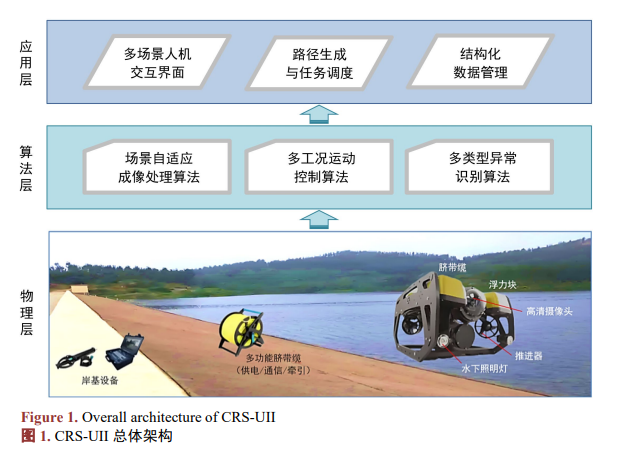
物理层硬件模块设计
1. 有缆机器人本体
有缆机器人本体采用模块化设计,由成像模块、推进模块、感知模块、控制模块及脐带缆接口模块等组成,各模块通过标准化接口实现快速拆装与功能扩展。
2. 脐带缆
连接机器人本体和岸基设备脐带缆绳具有供电、通信和机械牵引等多重功能。脐带缆采用复合结构,内部包含动力线、数据线和加强芯。动力线为机器人提供稳定的电力供应,采用多芯铜缆,额定电压220V;数据线采用光纤,用于传输高清图像数据和控制指令,传输速率不低于1 Gbps;加强芯采用高强度凯夫拉材料,提高脐带缆的抗拉强度,使其能够承受机器人在水下作业时的拉力。脐带缆采用特殊的密封结构和材料,确保在水深100 m以内不会发生渗水现象,保护内部的动力线和数据线。
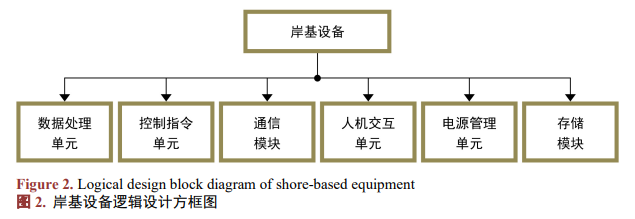
3. 岸基设备
岸基设备是操作人员与水下机器人进行交互的平台,采用工业级集成设计,其逻辑设计方框图如图2示意。
算法层设计
1. 成像处理算法
图像去噪:采用基于小波变换的去噪算法;
色彩校正:针对水下图像的色彩失真问题,设计采用基于灰度世界假设的色彩校正算法;
图像增强环节,将引入生物侧抑制机制设计滤波算法,以突破常规方法的局限性。
2. 运动控制算法
为提高机器人的运动精度,采用基于模型预测控制(MPC)框架构建含脐带缆拉力耦合的动力学模型,采用六自由度模型描述机器人运动,通过位姿与速度的映射关系体现运动特性,同时引入由拉力系数与实测拉力确定的脐带缆拉力干扰项,以反映缆绳对机器人运动的影响。目标函数设计为:

式中,Δx=xref−x 为轨迹误差,u为推进器控制量,Q=diag [10,10,5,1,1,1] ,R=diag [0.1,⋯,0.1] ,预测时域R=8 。
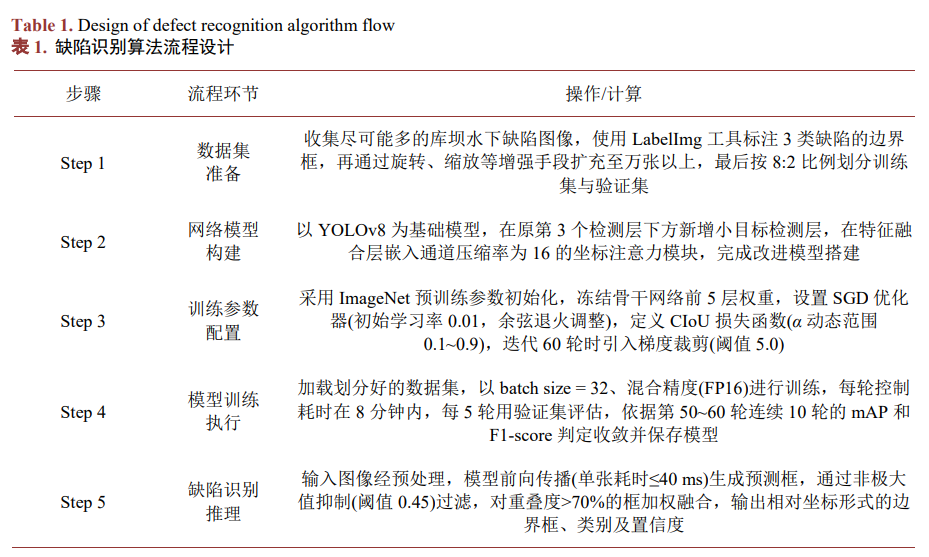
3. 缺陷识别算法
缺陷识别算法流程设计参见表1。
应用层功能设计
1. 人机交互界面
主体分四个功能区:中心实时成像区以双屏联动展示,主窗口显示高清处理图像(≥1920 × 1080),支持缩放、标记,辅助窗口同步对比原始与增强图像;左侧状态监测区通过仪表盘与列表,实时刷新机器人姿态、深度、缆绳拉力等参数,超限触发颜色预警;右侧控制指令区采用摇杆 + 触控按钮,负责三维运动控制及成像模式切换、照明调节等功能,指令延迟≤50 ms;底部任务规划区支持预设轨迹导入与手动绘制,实时叠加显示规划轨迹与当前位置,提供任务进度与电量预估。
2. 任务规划
任务调度支持多模式:自动模式按优先级(裂缝 > 蚀坑 > 巡检)执行;手动模式可插入任务并重新排序;应急模式在缆绳拉力>300 N或系统异常时启动返航。集成任务仿真功能,预演路径并统计作业时长(误差≤5%)与续航。
3. 数据管理
数据管理模块采用分布式存储架构,分类存储水下图像、设备状态、操作日志等数据,支持按时间、位置、缺陷类型多维度检索,响应时间≤1 s。
结束语
文提出的库坝系统水下成像探查有缆机器人系统(CRS-UII)设计模式,作为库坝安全监测的关键前端设备,可满足水下结构高效精准的探查需求,其特点如下:
(1) 硬件层采用模块化集成设计,机器人本体融合生物侧抑制滤波增强的成像模块、六自由度矢量控制(推进效率优化至0.82)的推进模块及多维度感知模块,配合复合铠装脐带缆,实现高清成像、低耗灵活运动与稳定作业的协同。
(2) 算法层构建“成像优化–运动控制–缺陷识别”全链路处理体系,通过联合去噪增强算法提升图像质量,改进模型预测控制MPC与定位更新模型(Xk=Xk−1+vk⋅Δt⋅cos(θk) ),保障轨迹与定位精度,改进YOLOv8模型实现微小缺陷高效识别,支撑探查精准性。
(3) 控制系统具备智能交互、任务规划与网络协同能力,通过算法协同实现路径优化与动态调整,支持多模式调度,可接入库坝安全监测平台构建全域网络,为运维决策提供精准数据支撑。
基金项目:
本文得到国家自然科学基金(62463021)、江西省自然科学基金(20242BAB25049)的资助。
更多推荐

 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)