- @zWLzTRxDJb
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
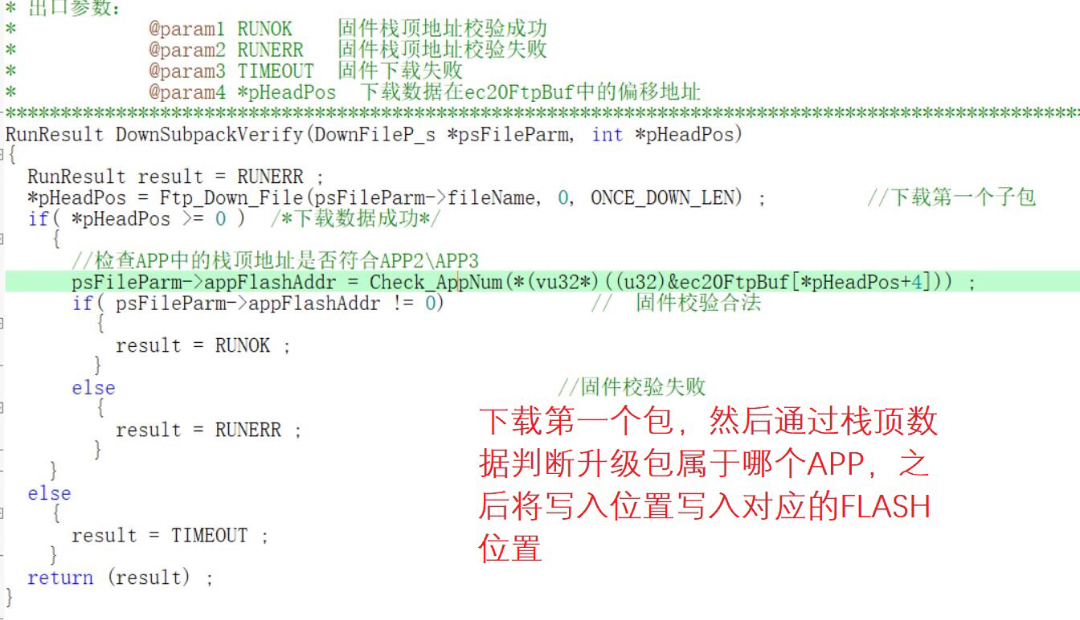
ABM开发板FreeRTOS版APP源码(APPV3.0)基于Cortex-M3架构与FreeRTOS内核,构建了一套功能完整、可配置、高可靠的嵌入式实时系统解决方案。其底层模块提供了处理器核心操作与启动支持,FreeRTOS内核实现了任务调度、通信同步等核心功能,可满足工业控制、智能硬件等领域的实时性与可靠性需求。开发者可基于此源码,通过配置与扩展任务逻辑,快速适配具体应用场景,降低嵌入式实时系
想发水论文的改个数据集就能用,正经做项目的建议把变异策略再魔改下,比如加个自适应变异率什么的。灰狼优化算法的改进点为:针对差分进化易陷入局部最优和灰狼算法易早熟停滞的缺点,利用差分进化的变异、选择算子维持种群的多样性,然后引入灰狼算法与差分进化的交叉、选择算子进行全局搜索。灰狼优化算法的改进点为:针对差分进化易陷入局部最优和灰狼算法易早熟停滞的缺点,利用差分进化的变异、选择算子维持种群的多样性,然
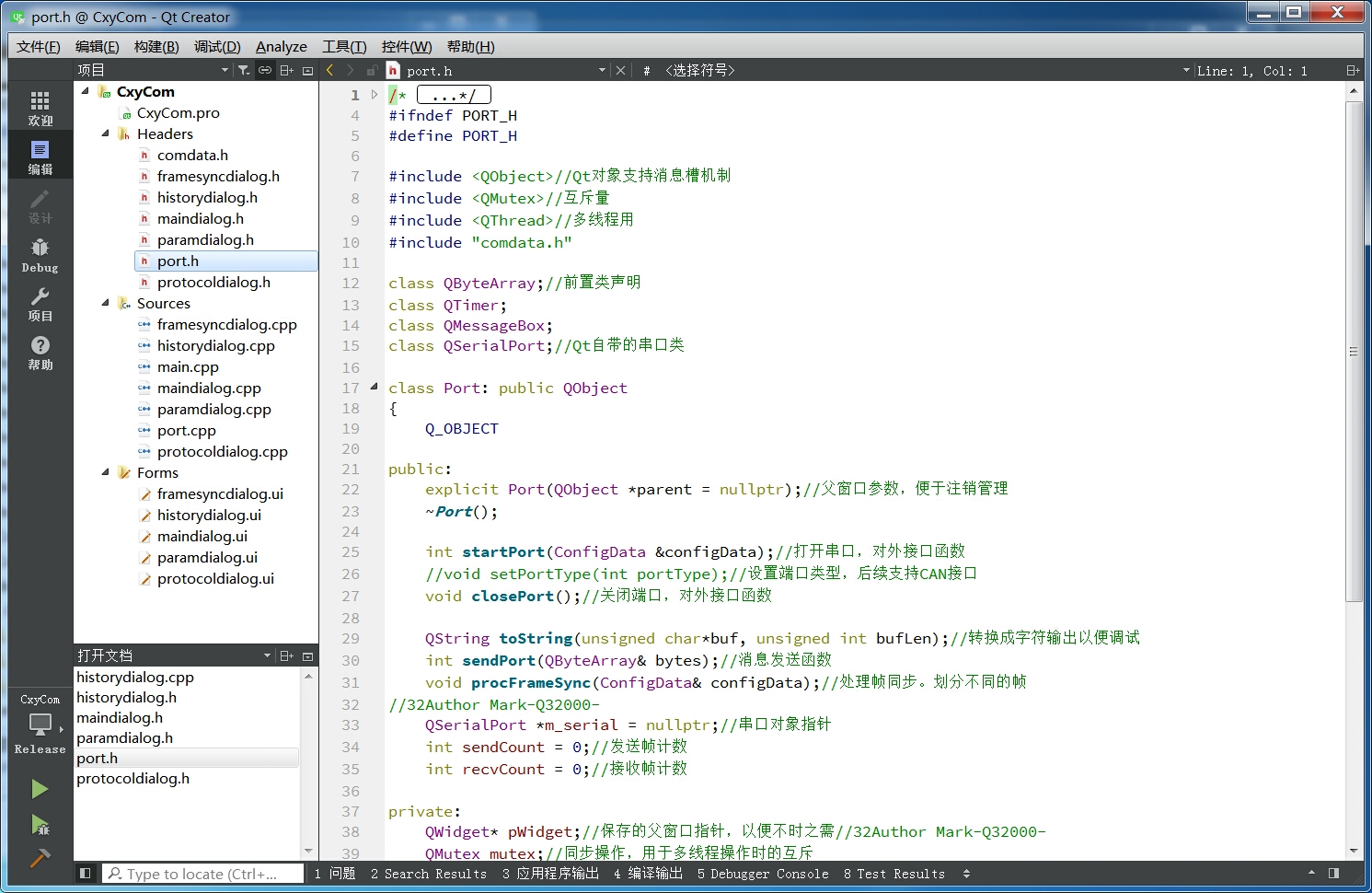
采用Qt编写的串口调试助手工具,功能齐全,除了具备十六进制收发及文件保存等基本功能外,还具有以下功能:可以对发送的历史数据存储,还可存储常用的两条数据;可配置帧同步配置,即根据帧头帧尾及长度等,判断一帧数据是否接收完成;采用Qt编写的串口调试助手工具,功能齐全,除了具备十六进制收发及文件保存等基本功能外,还具有以下功能:可以对发送的历史数据存储,还可存储常用的两条数据;每个解析器子类实现不同的帧判
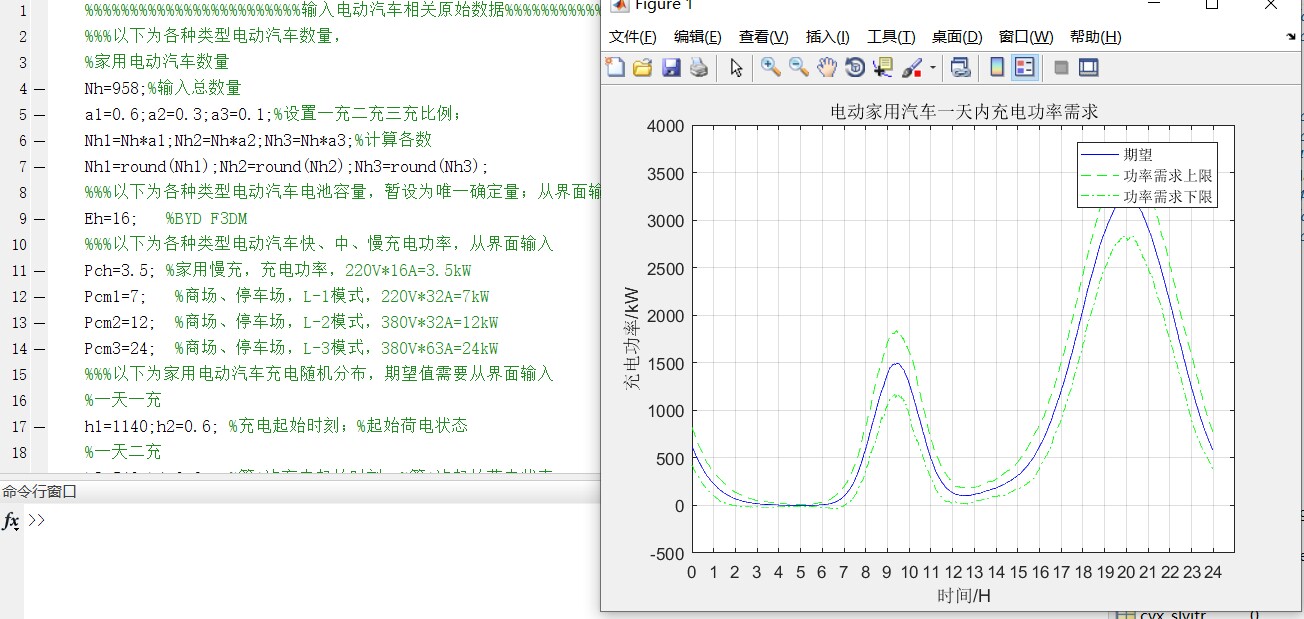
咱们直接动手,先看核心思路:把小区里的电动车分成一充(白天补电)、二充(早晚双充)、三充(随机补电)三种类型,通过大量随机抽样生成充电负荷曲线。这里有个小技巧,用cell数组存储不同类型的充电时段,特别是三充类型直接用了随机生成时段,这样每次模拟都会有变化。注意看二充类型用了分号隔开两个时段,后面处理的时候要拆开循环。Matlab利用蒙特卡洛模拟,将电动汽车EV分为一充二充三充三种类型,仿真电动汽
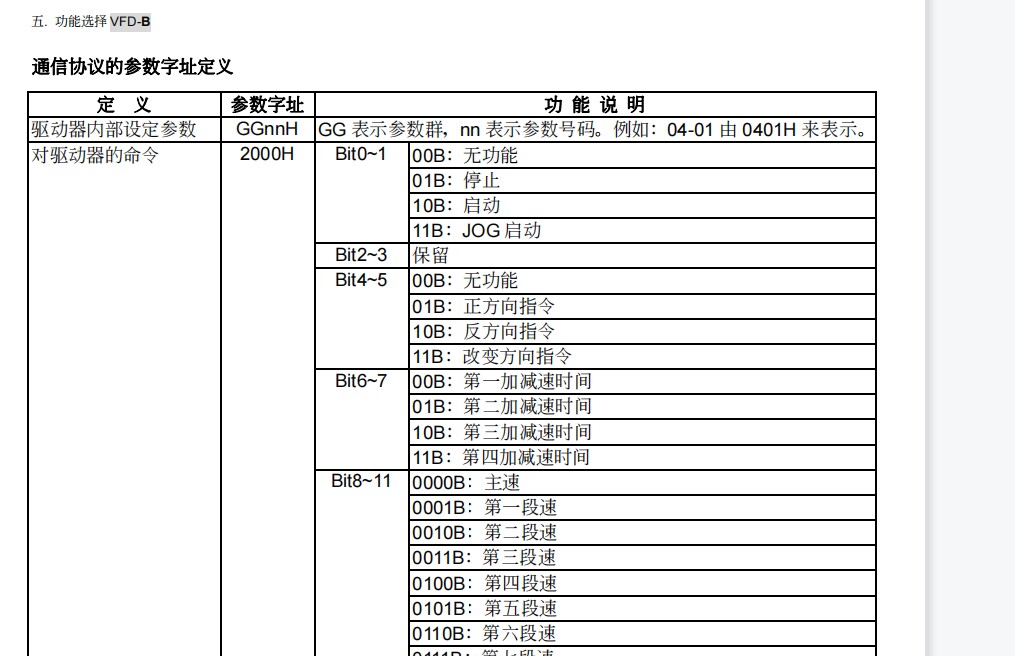
轮询西门子200smart与3台变频器9个模拟量输入,程序包括Modbus RTU轮训控制,实时读取电流,频率 控制启停,模拟量采集温度和电流外加变频器说明书一份,只有plc程序跟变频器说明书。轮询西门子200smart与3台变频器9个模拟量输入,程序包括Modbus RTU轮训控制,实时读取电流,频率 控制启停,模拟量采集温度和电流外加变频器说明书一份,只有plc程序跟变频器说明书。
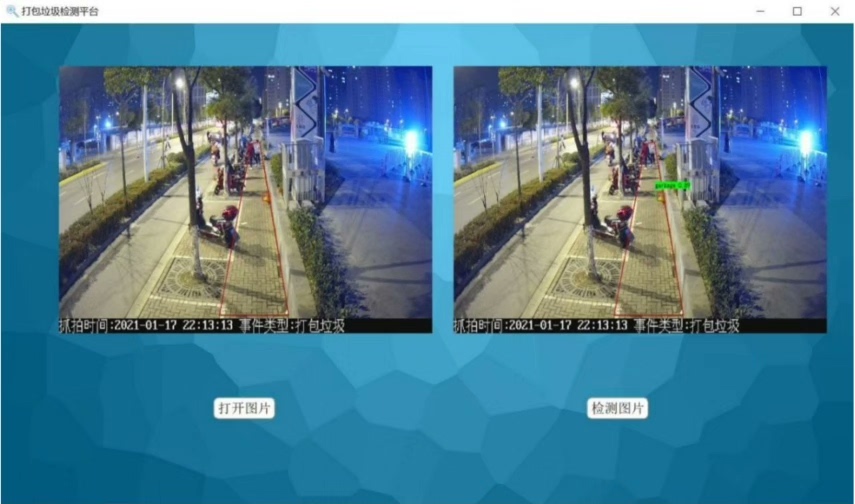
基于城市场景的垃圾检测算法,首先收集城市垃圾样本集, 再利用 LabelImg工具对城市垃圾样本集进行垃圾标注,并对城市垃圾样本集中的图片进行归一化处理;而后将转化后的样本图片集输入至 Faster RCNN 算法中,建立目标分类模型,并利用 PASCAL VOC2007 数据集的图片对所建立的目标分类模型进行验证,直至统计目标分类准确率不低于 90%,最后对含有城市场景的视频进行图片解码,利用建
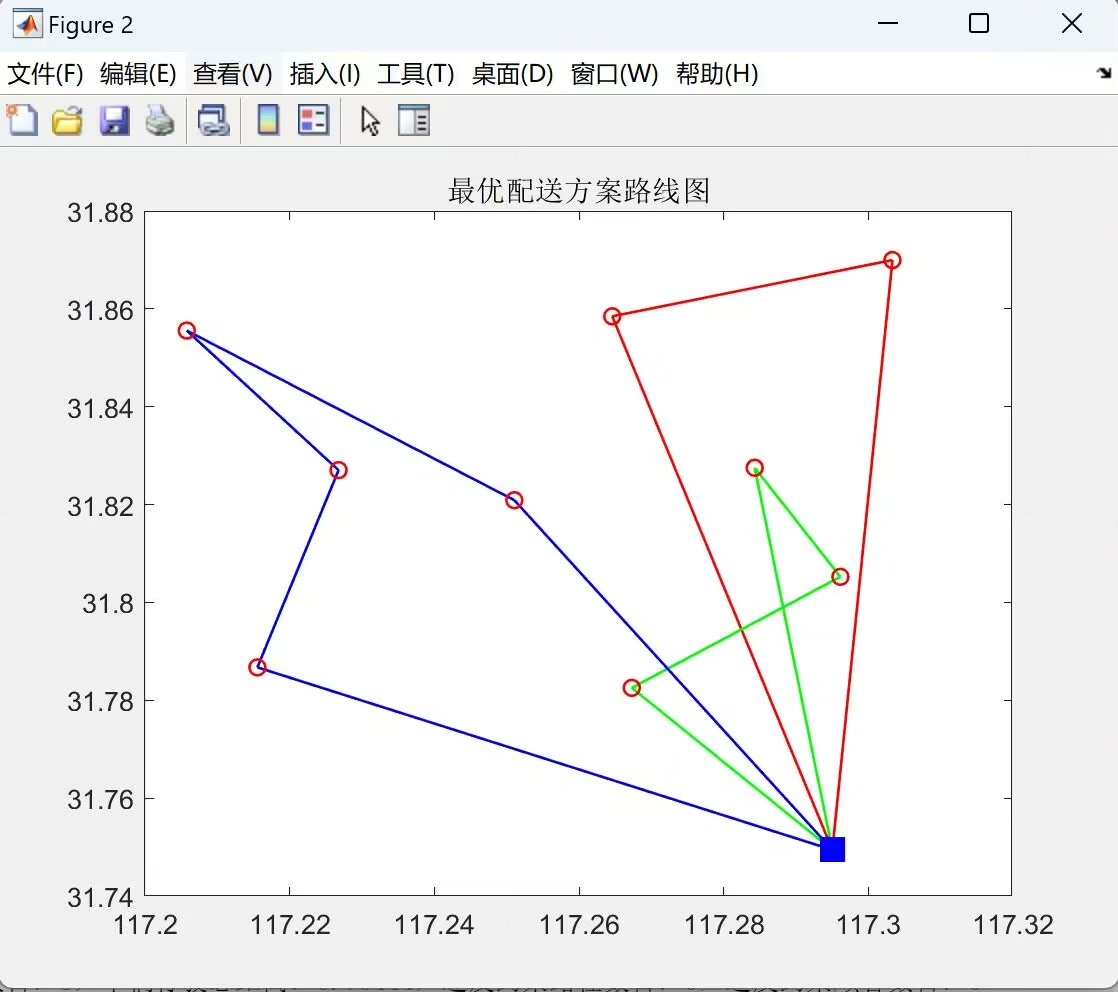
用MATLAB搞路径规划是真的爽,尤其是配上自己写的GUI界面。先看看这个工具的核心功能——支持切换遗传/蚁群/A*/贪婪等六种算法,能自定义地图障碍物,实时显示路径成本,还能导出规划数据给AGV小车用。记住,没有万能算法,只有合适场景——这也是做这个GUI的意义,让你像换武器一样根据战场选装备。附有gui界面,在界面内选择、变形算法,也可以自定义起点、终点、障碍物位置。遗传算法,蚁群算法,改进蚁
直流电机转速电流双闭环控制simulink仿真在电机控制领域,直流电机以其良好的调速性能和转矩特性备受青睐。而转速电流双闭环控制策略更是能够让直流电机在复杂工况下实现稳定、高效运行。今天就来唠唠基于Simulink的直流电机转速电流双闭环控制仿真。
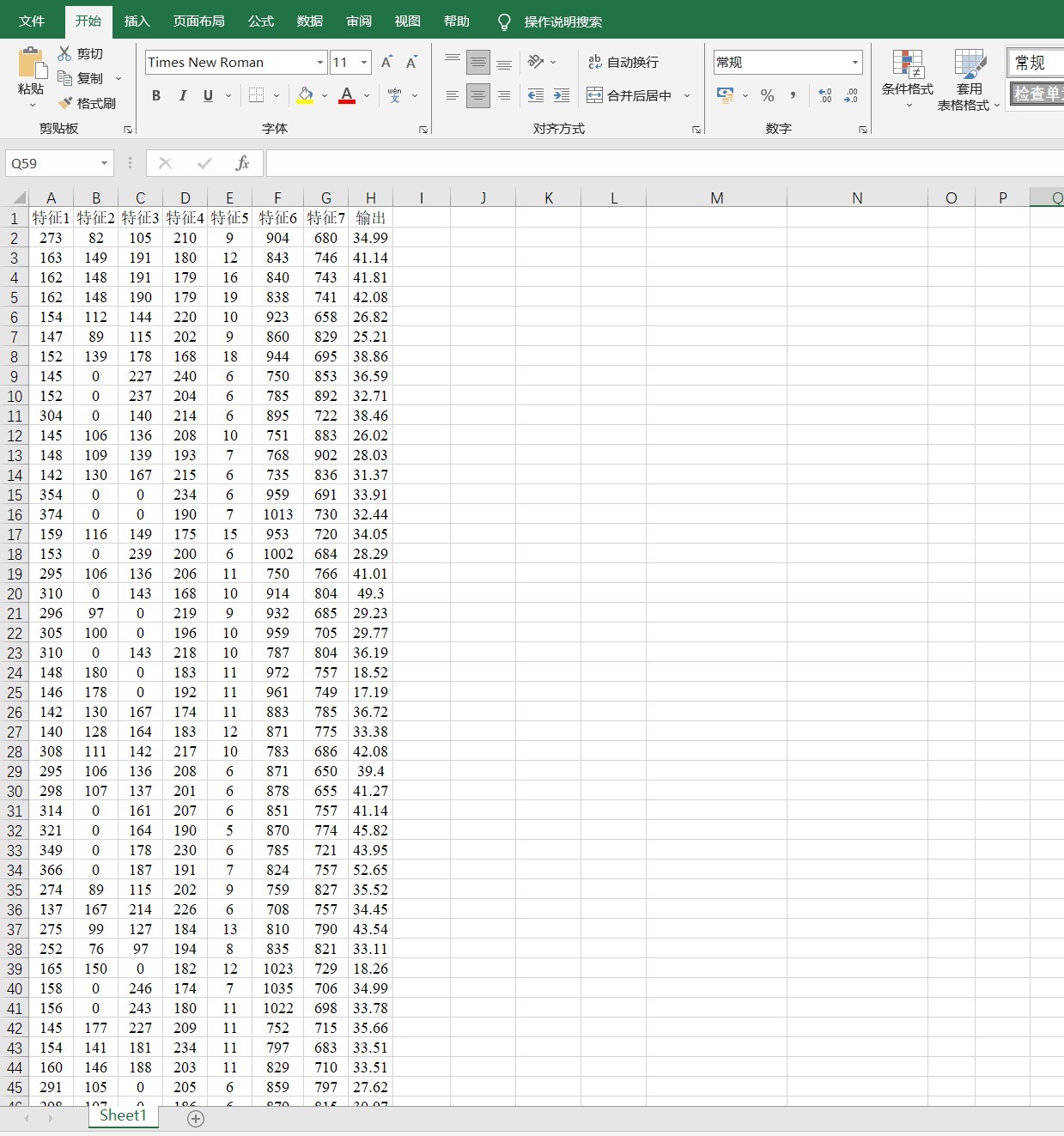
3]模型中Transformer部分为源码结构,模型结构清晰,数据替换简单,适合初学者学习,也适合本科毕设,研究生毕业论文。[3]模型中Transformer部分为源码结构,模型结构清晰,数据替换简单,适合初学者学习,也适合本科毕设,研究生毕业论文。适合负荷预测,风电预测,光伏预测,寿命预测等一系列时间序列预测,同时也适合多特征回归预测,适合负荷预测,风电预测,光伏预测,寿命预测等一系列时间序列预
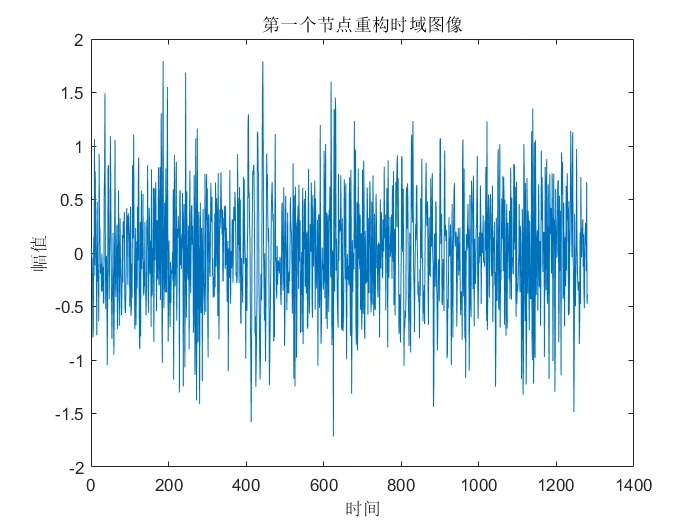
9_matlab小波包分解matlab2019a及以实现对输入信号进行小波包分解,绘制分解树及原始信号各个节点的节点系数及节点系数重构选择特定节点系数重构原始信号与原始信号对比将特定分支重组并显示分解树及使用重组信号重构原信号有详细介绍并附带注释,保证可以运行附带一份数据,可以查看数据格式来调整你的数据最后使用代码运行。