




- @yy197696
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在使用initramfs的过程中我感觉相比于传统的我们直接挂载块设备/dev/mmcblk0 /mmc/sda1 之类的挂载点来看相比于读写块设备 ,读写ram总归是会快很多的,系统性能会有所提高。可以避免一些需要频繁擦写数据的情况对于块设备的消耗,可以提升设备寿命,对于不怎么开关机长期保持上电状态的设备比如交换机,网桥之类尤其如此。
大概在很早以前就听说过opencv了一直想搞一个玩一玩。后来分别尝试了在ARM平台交叉编译,Ubuntu平台,Windows平台移植了QT+opencv环境。为什么我对QT的环境那么执着呢。一方面确实是QTE的跨平台的特性十分吸引我,而且听说不久以后又将有QT for Mcu 的推出,另外一方面QT Creator 本身就是一个非常优秀的集成开发环境。特别是在LINUX下,QT的代码提示,代码高.
摘要:在本篇文章中我将先对于灰度变换的一些基础的知识进行陈述。在那之后我将基于先前已经完成的基于图像处理的基础代码实现图像的灰度变换。为了可以绘制一幅直方图,我不得不在从底层实现一些基础的画笔工具,随后基于前面的灰度变换,我可以绘制出一幅图像的直方图。基于直方图可以对于图像的一些基础的特征进行分析。接着实现了一个可以进行直方图均衡化处理的函数,实现图像加强的目标。最后基于一种特殊的情况分析直方图均
(一)基础知识极坐标变换及其反变换的关键在于,根据极坐标变换前的图像(我们称为“方图”)确定极坐标变换后的图像(我们称为“圆图”)上每个像素点的像素值。也即是找到“圆图”和“方图”间几何坐标的对应关系。1、极坐标变换原理:如下图所示,实现极坐标变换的关键即在于找到圆图上任一点P(i,j),在方图上对应的点p(m,n),然后通过插值算法实现圆图上所有像素点的赋值。方图上,其行列数分别为M...

现在最常见的蓝牙模块为HC05,对小车的蓝牙遥控本质上是通过串口的收发信息进行控制。需要提前下载一个蓝牙串口的APP手机应用商店就有。这一部分代码只需要编写main串口函数直接用原子的函数无需修改。#include "delay.h"#include "sys.h"#include "usart.h"#include "stm32f10x_tim.h"#include "motor...
摘要:在本篇文章中本人将简单阐述图片编码的原理与实现方法。同时通过 windows平台下 mingw编译的libjpeg,libpng, zlib 第三方库,然后实现两种图片的编码与解码。(一)写在前面前一段时间本人一直在进行Opencv有关的学习,可是在学完了一堆又一堆的函数之后,发现自己对于图像处理的知识其实本质上还是什么都不会。我相信真正图像处理一定不是仅仅调用几个函数就可以了事的,一...
文章目录(一)均值滤波(二) 高斯滤波(三) 中值滤波(四)选择滤波算法(五)代码实现li_smooth.cmain.c(六)写在后面(一)均值滤波用其像素点周围像素的平均值代替元像素值,在滤除噪声的同时也会滤掉图像的边缘信息。通过编程实现一个3X3的均值滤波器(example/conv/conv.c),滤波效果如下:图表 4 均值滤波1图表 5 均值滤波2分析:均值滤波算法简单能很快的对图像进行
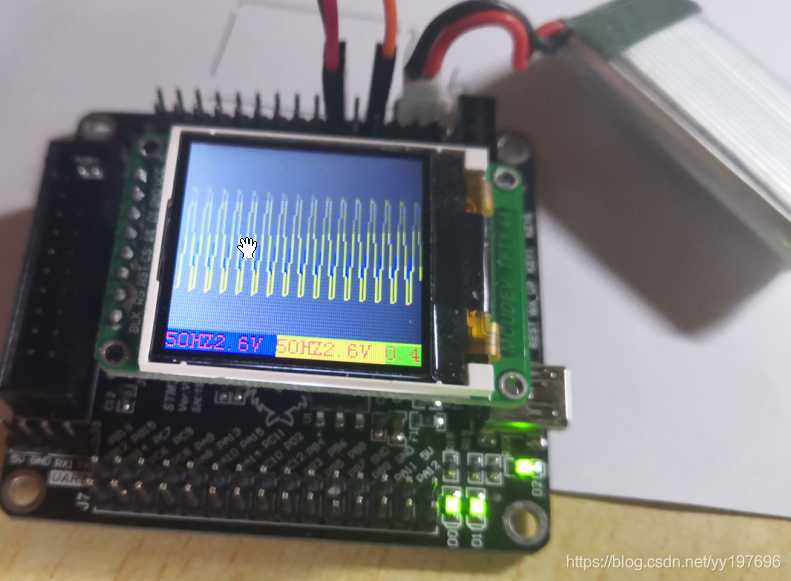
文章目录(一)前言(二)硬件介绍(1)MCU(2)TFT显示屏(3)按键接口(三)驱动编程(1)ADC驱动(2)LCD驱动(3)一路测试PWM(四)FFT原理(四)操作逻辑(五)操作效果0.1KHz0.2KHz0.4KHZ0.8KHz1.6KHz3.2K6.4KHz双通道(六)下载地址(一)前言还记得之前因为个人需要,又不太想花钱买示波器,实现了一个简易的示波器。这个示波器非常明显存在以下几个非常
其实在很久以前我就一直想搞一下摄像头的移植。当时就在淘宝上买了一个没FIFO,OV7670的模块其实当时自己连什么是FIFO都不知道。就看他便宜然后就买了。结果买回来根本不会用而且没有提供驱动。虽然好像正点原子写了一个驱动但是和F1的接口略有不同,以我当时的水平又不能理解。捣鼓了一段时间后就放弃了,当时在论坛里到处找代码也没找到,虽然有人实现了但也没有给源码。之后一会忙考试,一会有要学点东西就..
文章目录开发板看看他香不香IO定义设置一下root密码吧更换源赶紧配置VNC已安装组件的使用cudaOpenCVcuDNNjetson nano 安装 TensorFlow GPU安装pip安装那些机器学习领域的包安装TensorFlow GPU版ROS安装什么是ROS选用ROS系统准备工作开始安装将安装源添加到source.list添加公钥和更新系统安装ROS初始化ROS将ROS配置信息写入环境