




- @yongbutuifei
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一、硬件准备1,树莓派3B2,pi camera3,工具:键盘、鼠标、显示器、SD卡读写器二、SD卡烧录操作系统1,U盘格式化软件SDFormatterv42,系统烧写工具Win32DiskImager3,系统镜像文件ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img三、软件系统安装1,测试相机...

1 六自由度机械臂介绍(Xu, Chen et al. 2016) 在机器人上加装机械臂,进行抓取和其他作业目前应用广泛。因此,本系统提供了一套六自由度机械臂,并专门为其配置了一个遥控手柄,利用这个手柄可以单独控制机械臂的每个关节运动。 现在先让我们运行这个机械臂控制的例程并学习其核心代码,体会机械臂控制的魅力。2 运行机械臂DEMO
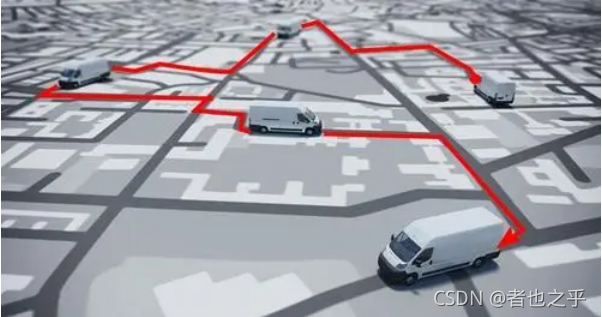
作为无人驾驶汽车顺利运行的重要环节,路径规划是指无人驾驶汽车在具有障碍物的环境中,能够规划出一条从起始位置状态到目标位置状态无碰撞的最优路径或次优路径,并满足所有约束条件,是实现汽车智能化的关键技术之一。基于采样的路径规划算法基于采样的路径规划算法很早便开始用于车辆的路径规划中,比较常见的基于采样的规划算法有概率图算法和快速随机扩展树算法。概率图算法是在规划空间内随机选取N个节点,之后连接各节点,
2020年,北京以加强智慧城市基础设施建设、实现高级别智能网联汽车规模化应用为目标,坚持循序建设、车路协同的原则,在北京经济技术开发区试验先行开展建设高级别自动驾驶示范区。截至目前,示范区1.0阶段建设基本完成,10公里城市道路、10公里高速公路和1个自主泊车停车场的智能化设施顺利部署,云控平台基础架构搭建完成,通信设备实现沿路覆盖,各项数据均处于全国领先水平。2021年4月北京市政府正式批复由北
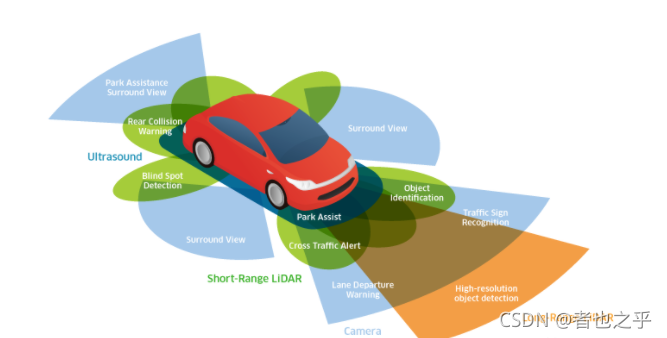
无人驾驶汽车为了保障行驶过程中的安全性,充分感知周围环境,采用了种类丰富的传感器。常见的有激光雷达、相机、毫米波雷达、超声波和惯性导航单元等。激光雷达:按线数分有1、4、8、16、32、40、64、128线等,按工作原理分有机械旋转式和固态式,而固态又分为MEMS型、Flash型、相控阵型。因为机械式技术相对成熟,可选择的产品丰富,目前大部分还是在用机械旋转式。激光雷达的优点是不依赖环境光源、测距
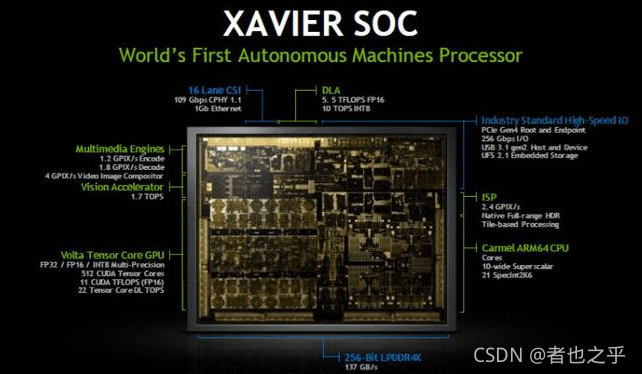
NVIDIA Jetson Xavier AGX 是一款外形小巧的计算设备。该设备拥有 512 核 Volta GPU 和 Tensor Cores、32 GB RAM、2 个深度学习加速器、1 个视觉加速器,并支持基于硬件的视频编码和解码。...
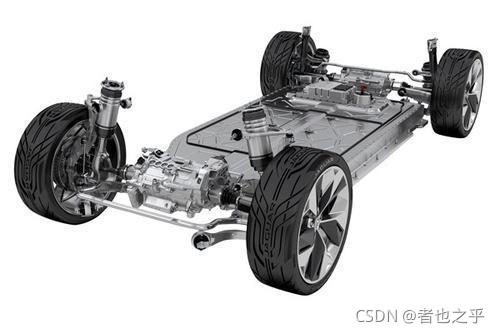
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。而转向和制动则是面向自动驾驶执行端方向最核心的产品,其中又以制动技术难度更高。线控油门:当前线控油门或电子油门技术已经成熟。针对传统燃油车,线控油门现在基本是标准配置,混合动力和电动汽车中都是线控油门,基本不需要换挡,若有也会是线控。电子油门控制系统经过这么多年的发展,已经不是最初的电机控制节气门概念了,而逐渐发展成为
利用IMU计算并以节点形式发布里程计

NVIDIA Jetson Xavier AGX 是一款外形小巧的计算设备。该设备拥有 512 核 Volta GPU 和 Tensor Cores、32 GB RAM、2 个深度学习加速器、1 个视觉加速器,并支持基于硬件的视频编码和解码。...
1 语音识别模块介绍(Xu, Chen et al. 2016) 上一章节我们介绍了如何用无线手柄控制我们的机器人底盘运动。除了手柄的遥控控制,实际使用过程中,我们还有用语音控制机器人底盘运动的需求。因此,我们在机器人底盘中内置了语音识别模块。 本系统争对机器人语音控制内置了四条控制指令:前进,后退,左转,右转。在每条指令被识别后,机器人将会分别回复:我将前进,我将