- @xEurCjvwu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文基于“DSP 平台 SMO”开源工程,对一套“全速域、全开源、全 C 代码”滑模观测器(Sliding-Mode Observer, SMO)方案做深度剖析,帮助开发者快速吃透其设计思想与工程落地细节。无感Foc电机控制,算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,很有参考价值。无感Foc电机控制,算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,很有参考
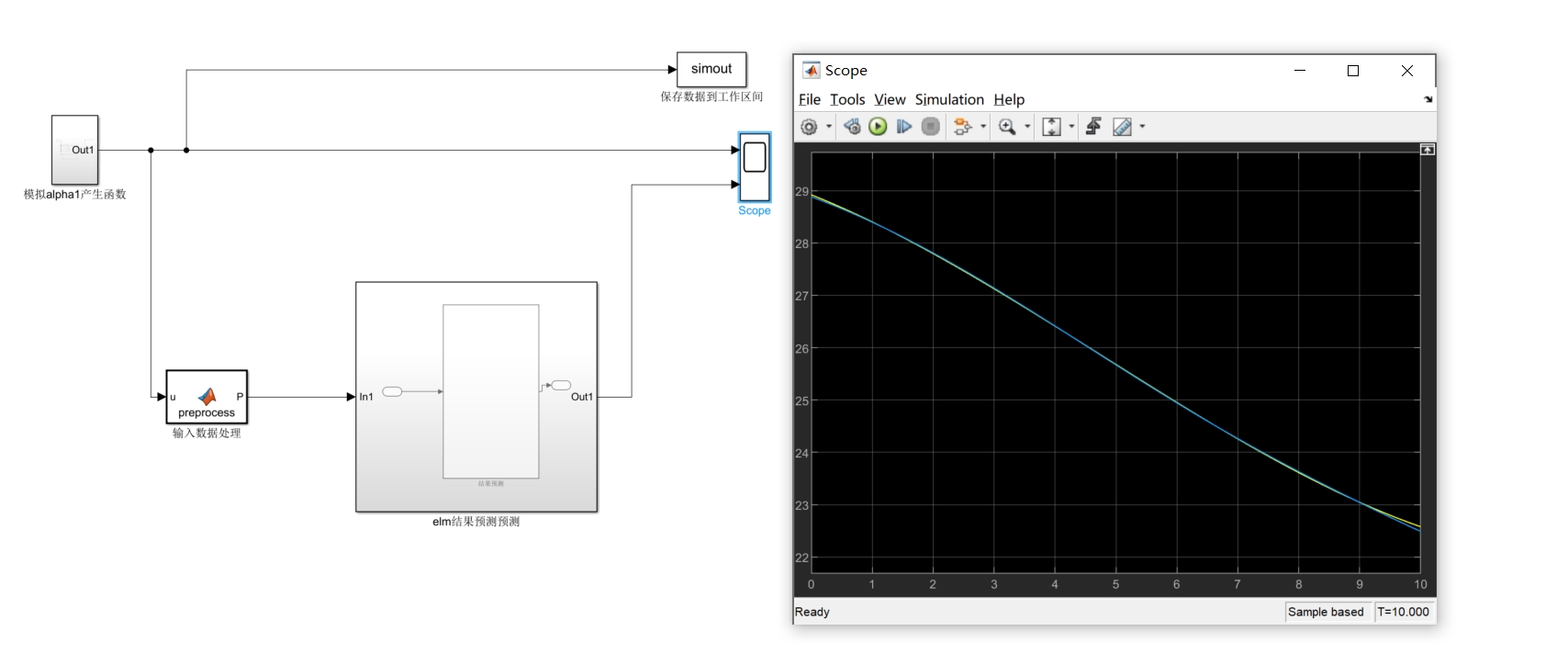
咱们先搞定模型训练和保存环节,再聊怎么在Simulink里玩转预测。这里有个细节要注意:输入输出数据需要转置,Simulink调用时维度必须和训练时一致。事先根据数据集对模型进行训练,以此保存最好模型,再在simulink中调用保存的模型,实现预测需求。事先根据数据集对模型进行训练,以此保存最好模型,再在simulink中调用保存的模型,实现预测需求。simulink调用神经网络训练好的模型进行回
CNN-LSSVM回归 基于卷积神经网络(CNN)-最小二乘向量机(LSSVM)的数据回归预测(可以更换为分类/单变量/多变量时序预测,前),Matlab代码,可直接运行,适合小白新手【24年最新算法】GOOSE-BiGRU回归基于鹅优化算法(GOOSE)优化双向门控循环单元(BiGRU)的数据回归预测(可以更换为分类/单变量/多变量时序预测,前),Matlab代码,可直接运行,适合小白新手程序已

凌晨三点,当最后那组效率MAP图完美贴合仿真曲线时,窗外的城市依然有电动车在无声驶过。电驱动标定就像在解一个动态魔方,每次你以为六个面都对齐了,实车总能给你新的排列组合。但正是这种永远存在优化空间的特性,让这个行当的工程师们痛并快乐着——毕竟,没有比在示波器上看到预期波形更让人愉悦的咖啡伴侣了。深夜的实验室里示波器曲线还在跳动,我盯着屏幕上那个0.3秒的扭矩响应延迟,咖啡杯在控制台边沿留下深褐色的
基于 Python 的 MNIST 手写数字识别系统即价格1使用 PyTorch 构建项目,可远程配置2支持加载 MNIST 数据、鼠标手写绘图3可显示 GUI 窗口,运行效果如下图所示4包含源码、实验报告、损失曲线图、准确率曲线图、混淆矩阵图、MNIST 数据集在深度学习的世界里,MNIST手写数字识别是一个经典的入门项目。今天咱们就来聊聊如何基于Python,用PyTorch构建这么一个功能丰
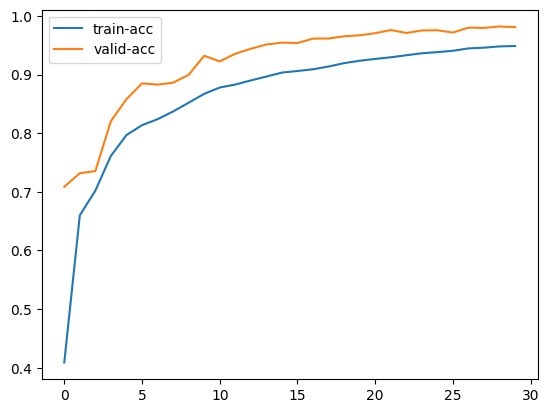
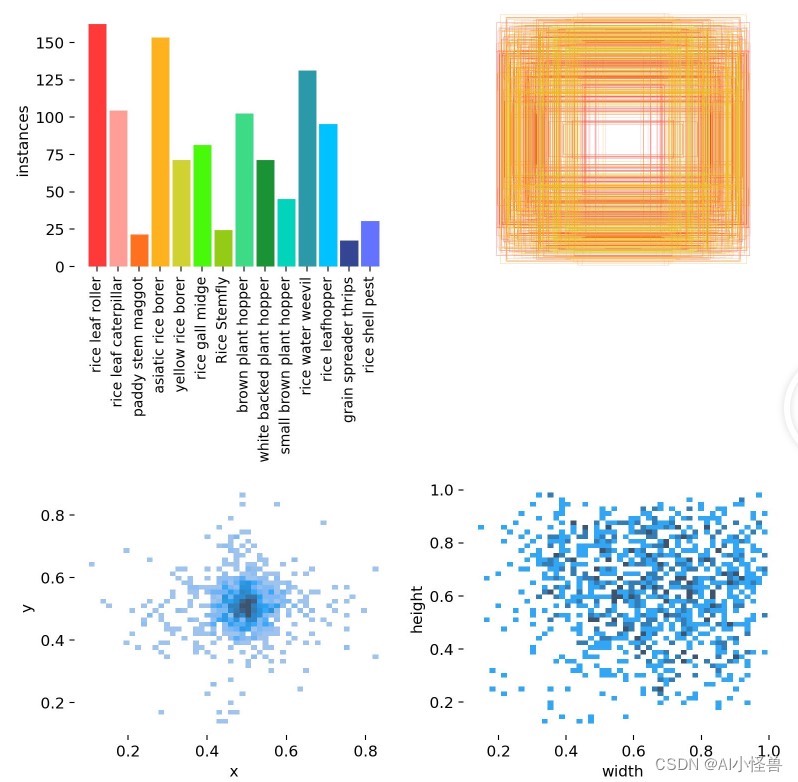
基于YOLOv8的水稻虫害识别系统,加入BiLevelRoutingAttention注意力进行创新优化本文摘要:基于YOLOv8的水稻虫害识别,阐述了整个数据制作和训练可视化过程,并加入BiLevelRoutingAttention注意力进行优化,最终mAP从原始的0.697提升至0.732含稻秆蝇、二化螟、褐飞虱、蓟马、蛴螬、蝼蛄等常见害虫,共14个水稻害虫类别,1200多张图像,yolo标注
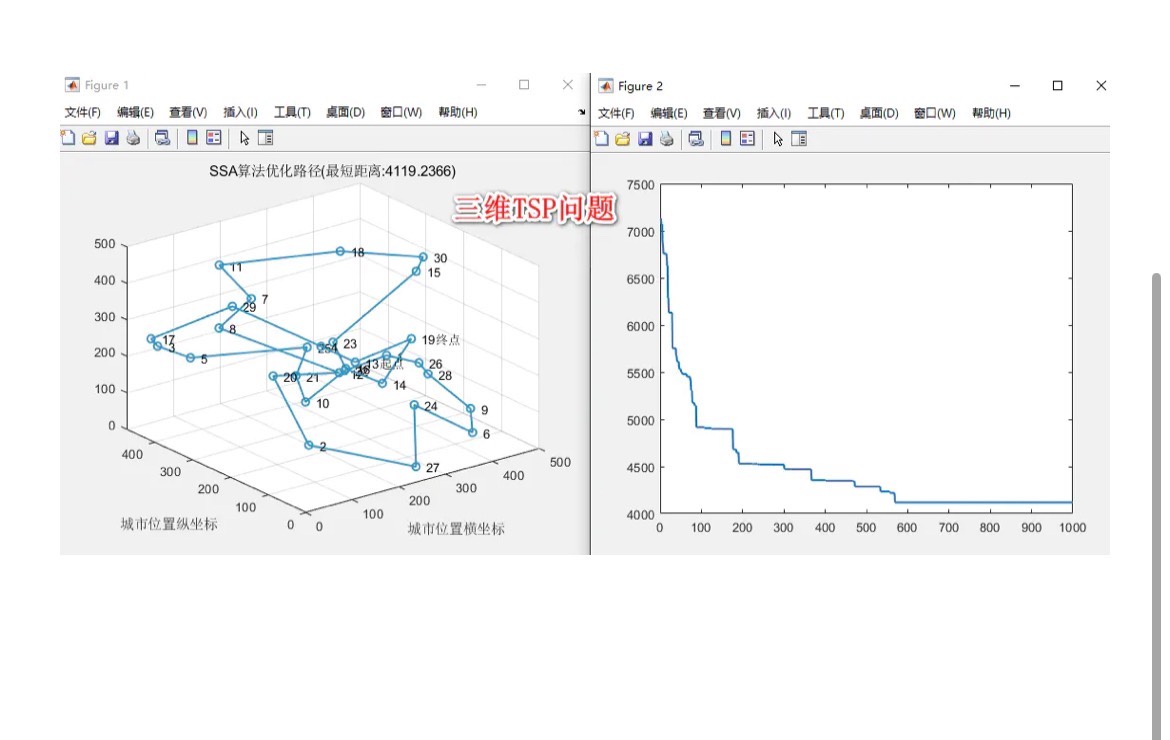
麻雀搜索算法(Sparrow Search Algorithm,SSA)是一种新兴的群体智能优化算法,灵感来源于麻雀群体的觅食行为和反捕食策略。本文将SSA应用于三维旅行商问题(3D-TSP)的求解,该问题是经典TSP问题在三维空间中的扩展,具有更高的复杂度和实际应用价值。
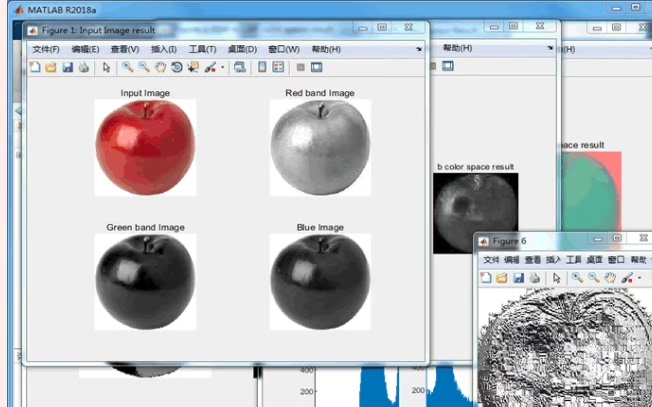
水果检测与自动识别分级:1,对于图像的灰度处理,二值化 2,边缘检测,特征提取,中值滤波 对于水果的分级,包括对水果的用颜色模型进行分析处理上周在社区超市兼职帮理货员姐姐理了三小时柑橘,指甲缝卡得全是橙皮油,最后挑出的大小均匀色泽又鲜亮的还没一小筐——分拣机要是能普及到这种夫妻老婆店就好了!但分拣机背后的核心其实就是几步我们普通人用Python OpenCV就能捣鼓出来的操作:先把水果从背景“揪出
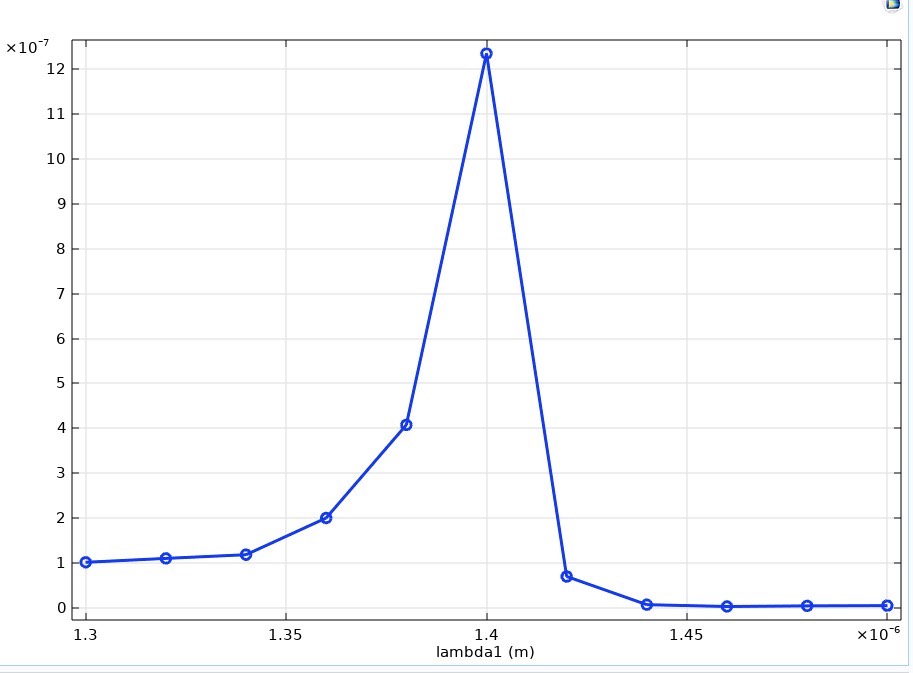
最近在折腾非线性光学仿真的时候,第三次被三次谐波生成的问题卡脖子了。最后说个血泪教训:千万别在参数化扫描时同时开六个并行线程,否则你会看到CPU温度成功突破沸点,主机箱变身暖脚器的奇幻场景。别被lambda0骗了,这里得用三次谐波的波长做基准。记得监控场能量曲线,要是出现心电图式的波动,八成是时间步长该剁手了。注意谐波场的实部虚部要分开处理,有次把两者直接相加,生成的花纹像极了毕加索抽象画,还被隔
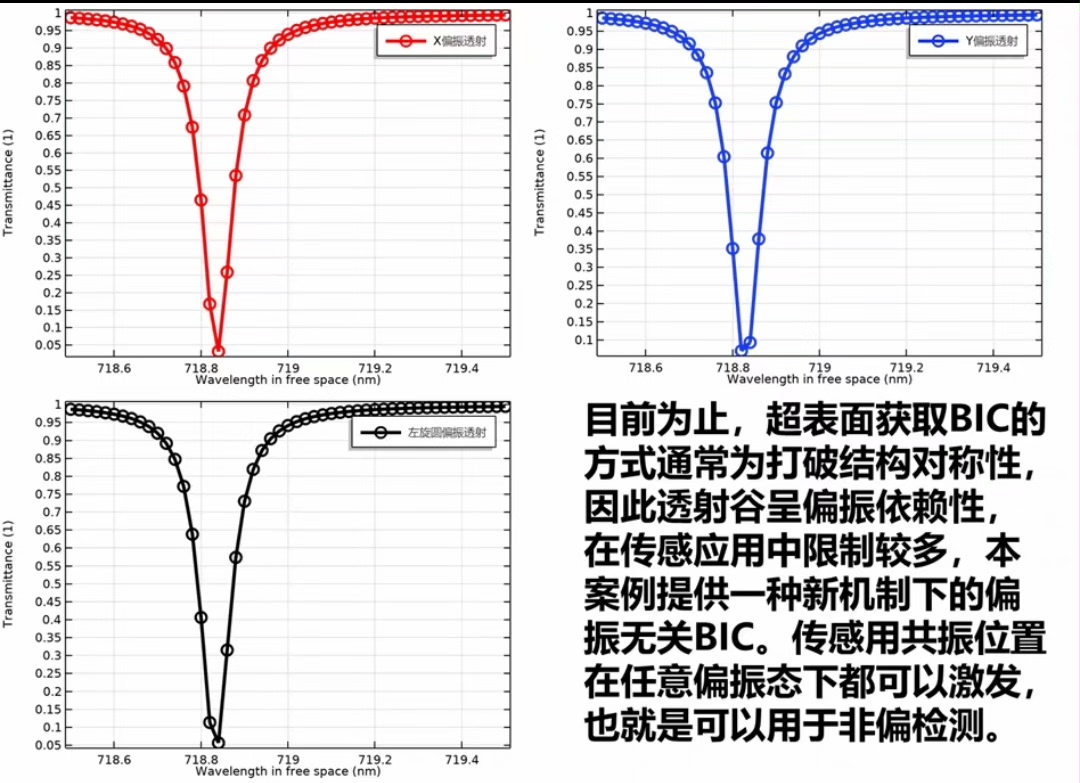
今天咱们要聊的这个新玩法,直接让超表面实现了偏振无关的BIC,堪称光学界的"万向节"。传统BIC方案跑这种扫描,Q值曲线会像过山车一样起伏,而新机制下的数据应该稳如老狗——哪怕theta从0°转到180°,Q值波动不超过5%。传统方法像在走钢丝,必须精确控制两个正交模式的共振位置。目前为止,超表面获取BIC的方式通常为打破结构对称性,因此呈偏振依赖性,本案例提供一种新机制下的偏振无关BIC。目前为