- @woyaomaishu2
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
复杂交叉场景 (如编译多个依赖关联的 ROS2 包) 无论怎么设置编译环境参数,系统编译时会优先从主机的/usr/bin/usr/lib等路径搜索工具, 而非自动识别挂载的镜像目录,故而总是存在混用主机 host 系统原生环境的情况, 这是交叉编译出现问题的原因.比如主机系统中运行并将日志直接输出到控制台及启用详细模式[错误输出例 1]:[错误输出例 2]:provide.参考ros2 嵌入式程序
网上资料汇总, 仅记录备份, 方便查阅.
只是记录以备忘.
SLAM 轨迹的对齐和评估时, 多用 Umeyama 算法实现.该算法从给定的两个欧几里得空间的关联点集中找出最小误差平方意义下的相似变换参数 (Similarity Transformation, 旋转+平移+缩放)[1]在上一篇博文中, 我们已经详细推导了该算法的数学原理.这里我们看一下实际应用中 Umeyama 算法的源码实现, 分别是- Eigen[2]中 Umeyama 算法源码- PC
PointNet (2016年) 和 PointNet++ (2017年) 实现了三维点云的部件分割、目标分类、场景语义解析, 是深度神经网络应用于三维点云理解的开山之作.PointNeXt (2022年,the neXt version PointNet) 是在前辈基础上的优化, 提出了训练策略的优化和网络结构的优化, 旨在进一步提升对三维点云理解的性能.
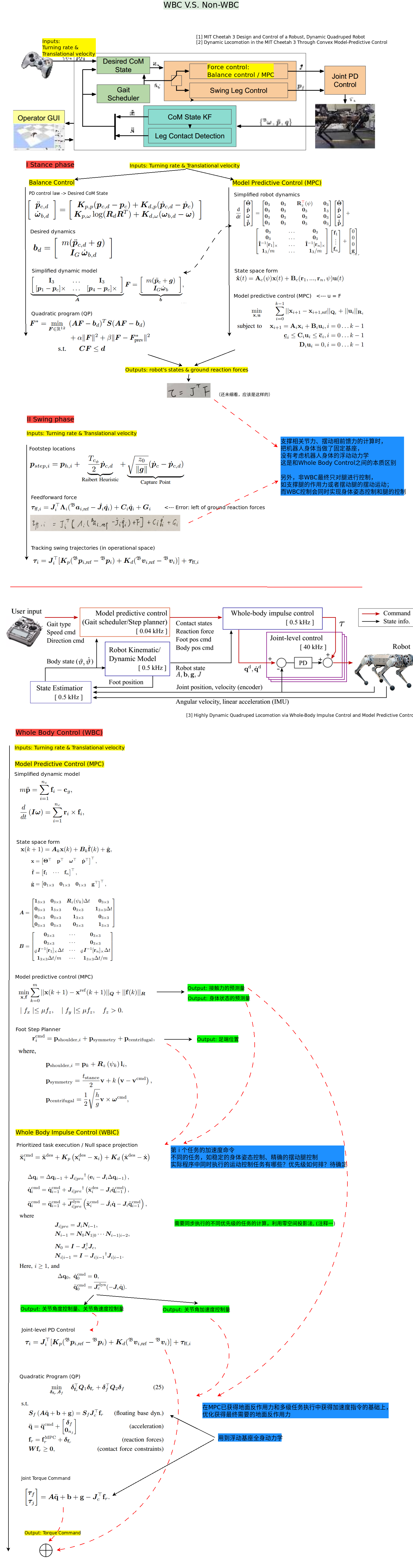
很久之前看过MITCheetah四足机器人动力学仿真与控制的开源代码.[这里的涉及的内容也只是书本上的动力学知识和开源的代码,不和任何产品有关联]这里简单回顾一下之前做的笔记,当时作为对开源代码的学习笼统地记了记.翻出来也共享一下,也为无人问津的博客加个篇数.[2]四足机器人全身控制与非全身控制的示意。四足机器人全身控制与非全身控制的示意。不过时间久远了,许多内容也忘了.这里只是一个当时做的笔记示
复杂交叉场景 (如编译多个依赖关联的 ROS2 包) 无论怎么设置编译环境参数,系统编译时会优先从主机的/usr/bin/usr/lib等路径搜索工具, 而非自动识别挂载的镜像目录,故而总是存在混用主机 host 系统原生环境的情况, 这是交叉编译出现问题的原因.比如主机系统中运行并将日志直接输出到控制台及启用详细模式[错误输出例 1]:[错误输出例 2]:provide.参考ros2 嵌入式程序
只是记录以备忘.
网上资料汇总, 仅记录备份, 方便查阅.
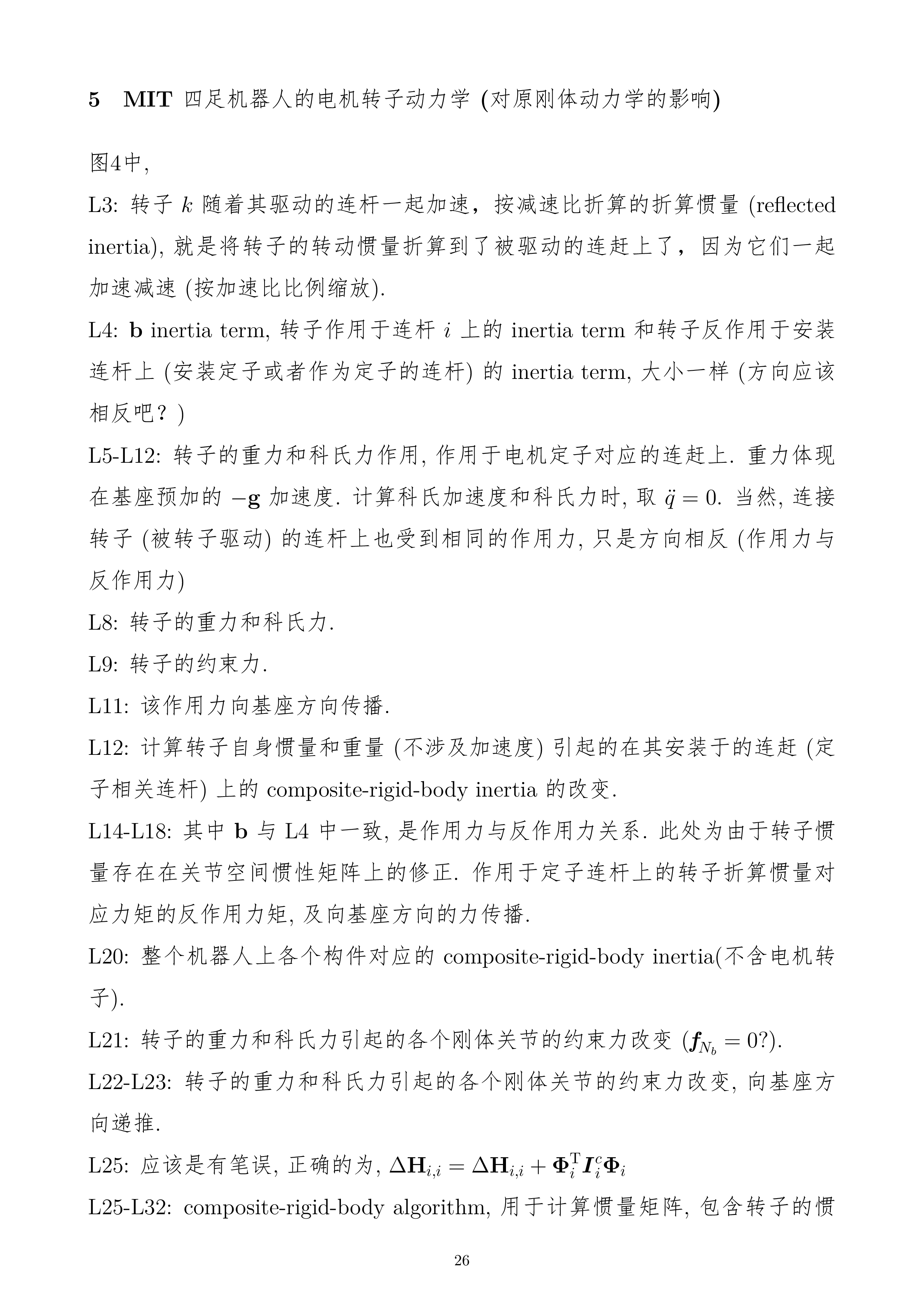
Title:MIT Cheetah 四足机器人的动力学及算法[1][2][3] MIT Cheetah 四足机器人的动力学及算法 (III) —— 电机转子动力学、刚体逆动力学、铰接刚体动力学之算法。