




- @weixin_58399148
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
容错控制概述(含推导)1. 系统描述2. 估计器设计4. 稳定性证明(重难点!!)5. 线性矩阵不等式(LMI)与舒尔补定理(Schur Complement)1. 系统描述设我们有如下线性系统{x˙=Ax+Bu+Efy=Cx(1)\begin{cases}\begin{aligned}\dot{x} &= Ax + Bu + Ef \\y &= Cx\end{aligned}\e
优化方法理论合集第8弹——庞特里亚金最大值原理。介绍了庞特里亚金最大值原理的内容,并列出了求解方法。
因此,由(3–1)得到的通解(3–2–1)所表示的动态过程也被称为“,即式(3)等号右边为0、式(3–1)的情况。对比式(3)和式(3–1),不难发现,(3–1)是(3)将等号右边项置零得到的,即。上述分析表明:一个函数直接进行拉氏变换得到的复平面表达式,和其先进行泰勒展开后进行拉氏变换得到的复平面表达式,是相同的。将泰勒展开应用在函数线性化中时,只取线性化的第一项,后面的高阶项全部用高阶小量表示
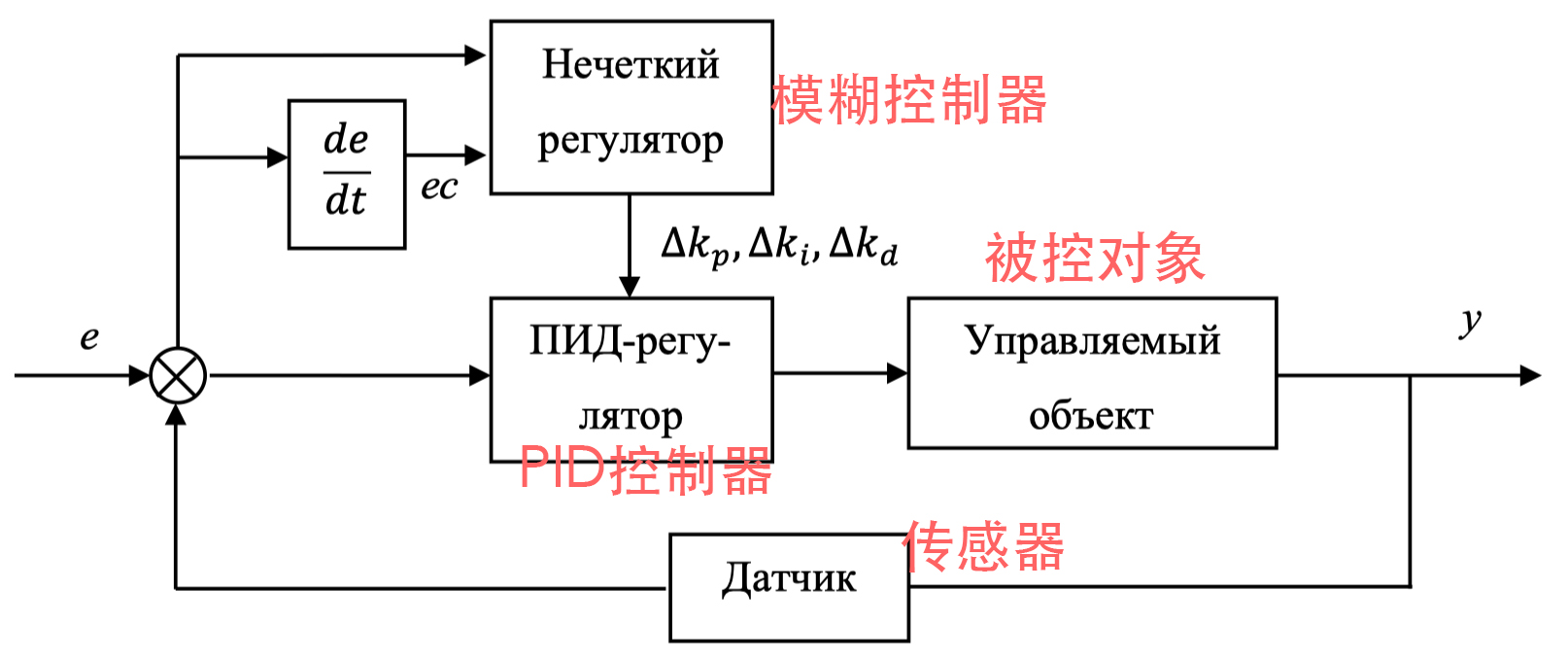
模糊控制笔记(三)模糊控制系统与模糊PID1. 模糊控制系统1) 量化2) 模糊控制系统组成3) 模糊规则2. 模糊PID本文章所有知识点均为作者本人学习刘杰、李允公等老师的教材《智能控制与MATLAB实用技术》时所作笔记,在此发自肺腑地表达对老师们辛勤劳动的感谢和尊敬,也安利一下这本书,对入门智能控制的同学们来说是一本极其优秀的教材!1. 模糊控制系统1) 量化一般地,根据输入信号的取值,将其分
动态表面控制DSC简单介绍1. 动态表面控制由来2. 动态表面控制的理论介绍1) 李雅普诺夫函数V1V_1V1的设计与求导2) 李雅普诺夫函数V2V_2V2的设计与求导3) 总体李雅普诺夫函数V3V_3V3的设计与求导1. 动态表面控制由来动态表面控制(Dynamic Surface Control, DSC)是非线性控制领域的一种方法,基于李雅普诺夫稳定性理论,其构建方式和过程与反步法(B
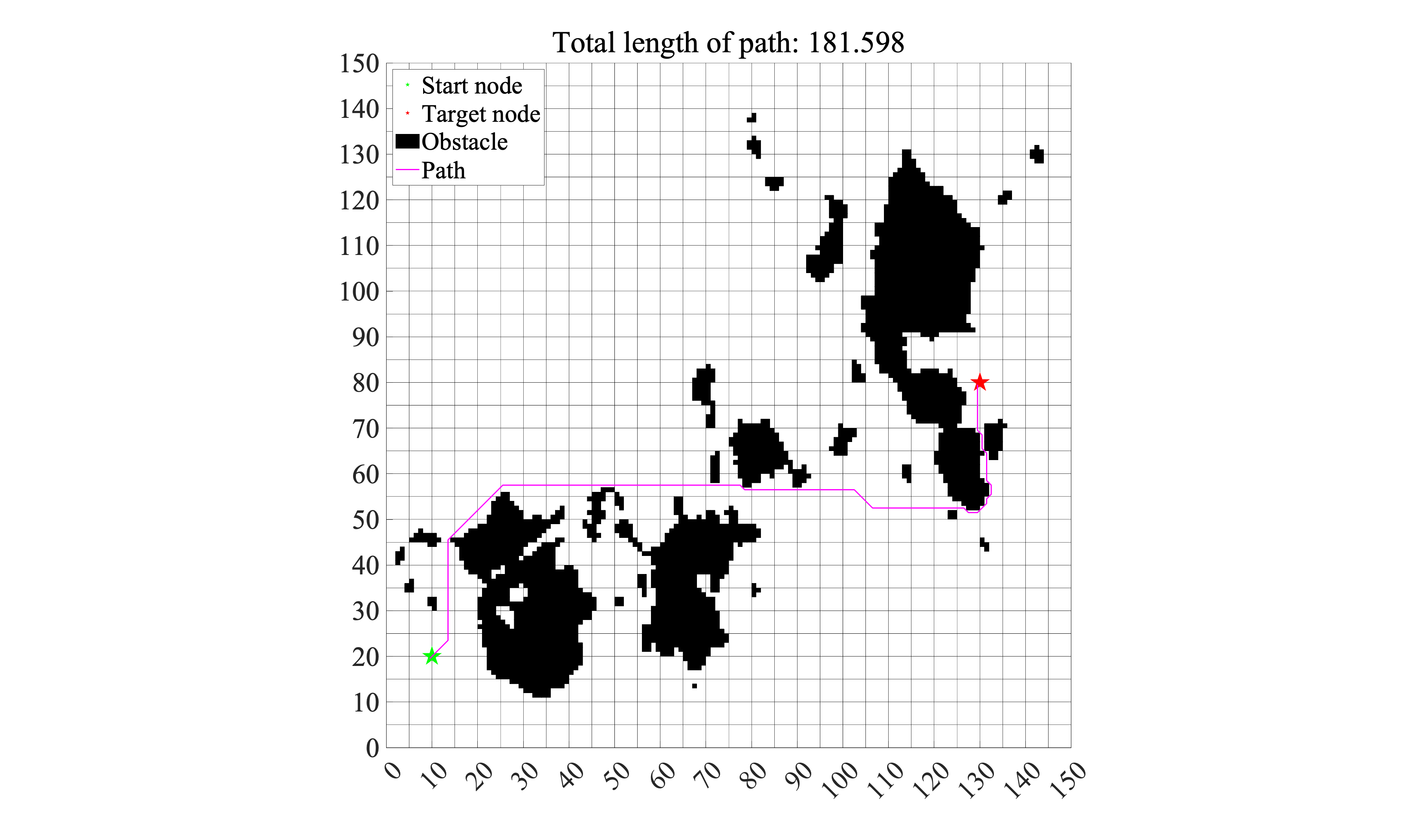
A*搜索算法简介及保姆级代码解读1. A*算法简单介绍1.1 A*算法理论基础1.1.1 节点计算1.1.2 由计算得出的小结论1.2 算法逻辑结构2. 代码解析2.1 引入地图2.2 预处理2.3 定义父节点`parent`2.4 主循环1. A*算法简单介绍A*算法是一种路径规划算法,和传统的Dijkstra算法有所不同,该算法有选择地进行节点搜索,因此比Dijkstra算法更快、搜索的点更少
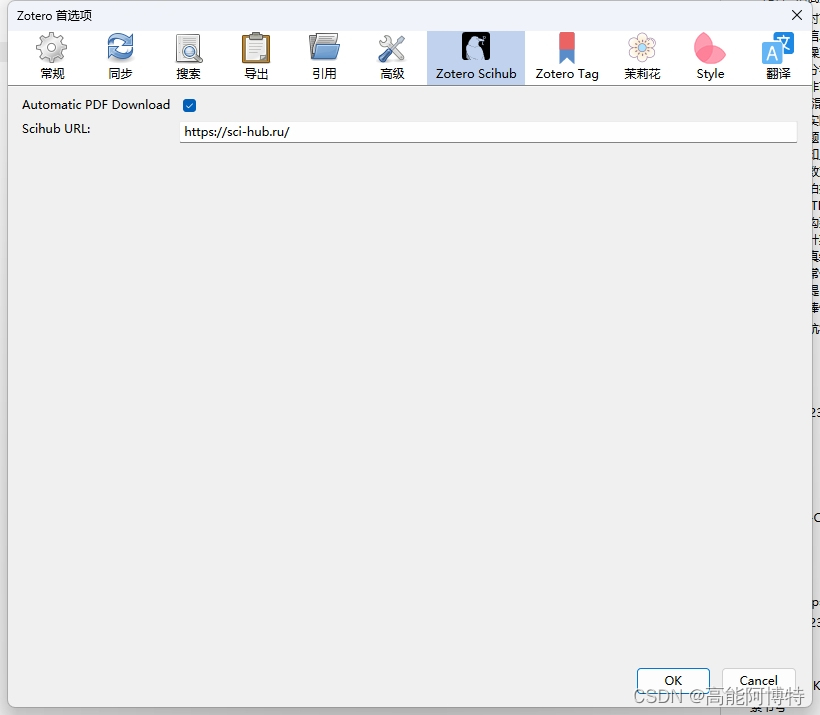
如果还未解决,可以点击Zotero中的编辑——首选项——茉莉花——中文插件设置,最下方有一个“PDFtk Server路径设置”,检查此处是否是绿色对钩。链接里先下载一个PDFtk Server,安装好,记好安装路径,之后在编辑——首选项——茉莉花——中文插件设置——PDFtk Server路径设置 中,设置为该安装路径,最后重启Zotero。在每次打开Zotero后,第一件做的事就去“编辑”——
整理了目前网上关于mac推出移动硬盘失败的解决方法