




- @weixin_53402301
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章目录前言一、中文字库的建立1.配置取模软件2.汉字取模二、配置工程源码1.导入字库2.中文显示函数3.在主函数中调用三、运行结果总结前言这篇文章记录了如何用stm32f103开发板控制TFTLCD显示屏显示中文。一、中文字库的建立1.配置取模软件这里用的取模软件是PCtoLCD2002完美版。点击字模生成液晶面板选项,完成如图配置。根据自己的需求配置字体的种类、大小,这里以16字号宋体为例。2
文章目录一、E18-D80NK红外避障传感器介绍简介:电气特性:机械特性:使用原理二、主程序代码三、接线总结一、E18-D80NK红外避障传感器介绍简介:E18-D80NK这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测80厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也

脉搏测量仪的设计是通过检测心跳的血液变化,产生不同的反射信号,用传感器将脉搏的跳动转换为电信号,并加以放大,整形和滤波,最后送入单片机中处理,本篇文章介绍了使用由5mm红外接收管和发射管构成的光电对管测脉搏的硬件电路设计。
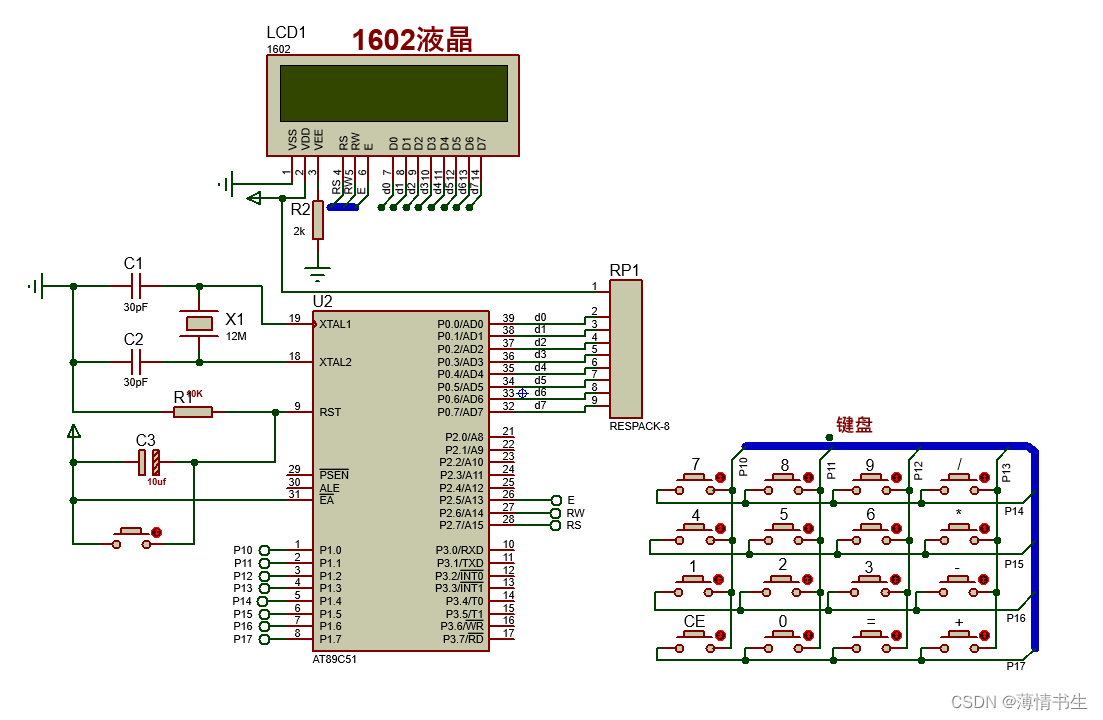
本设计是以AT89C51单片机为核心的计算器模拟系统设计,输入采用4×4矩阵键盘,可以进行加、减、乘、除4位带符号数字运算,最大运算是可达9999*9999,可以运算负数,并在LCD1602上显示操作过程。
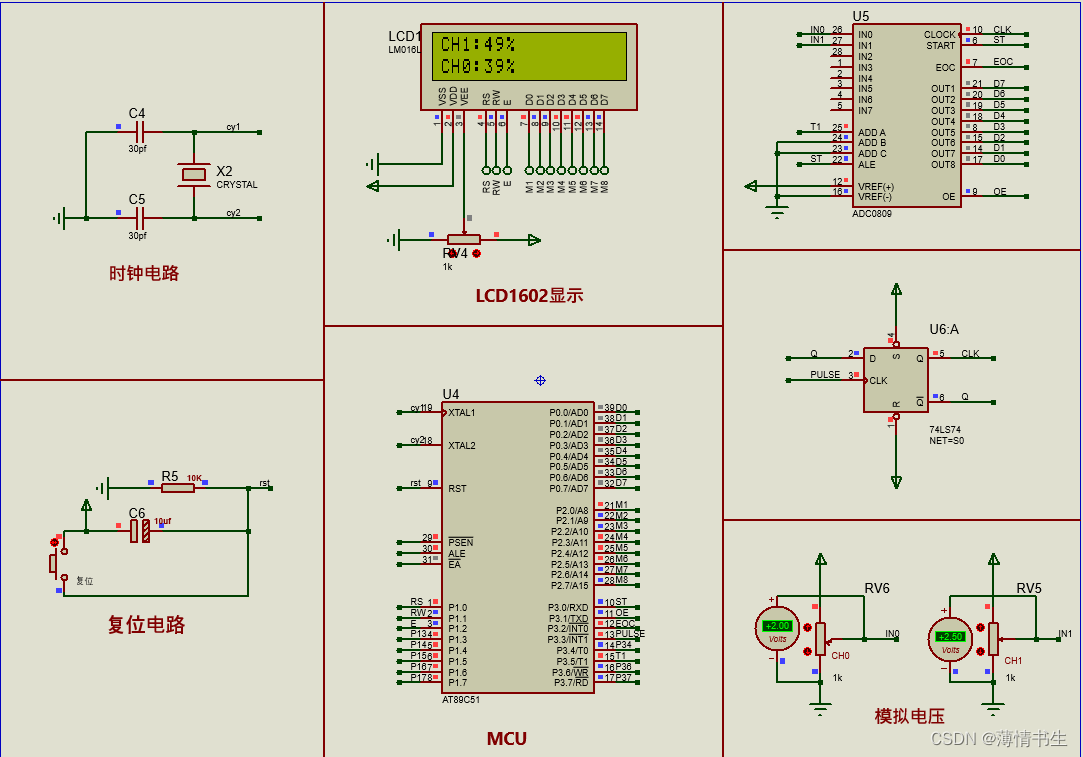
本设计采用AT89C51芯片和ADC0809芯片来完成一个简易的数字电压表,能够对输入的0~5 V的模拟直流电压进行测量,并通过LCD1602液晶显示屏进行显示,测量误差约为0.02 V。该电压表的测量电路主要由三个模块组成:A/D转换模块、数据处理模块及显示控制模块。A/D转换主要由芯片ADC0809来完成,它负责把采集到的模拟量转换为相应的数字量再传送到数据处理模块。数据处理则由芯片AT89C
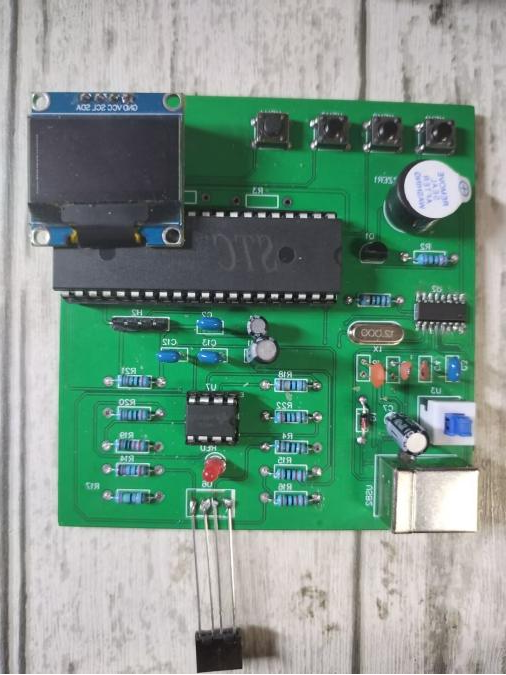
本课题设计的脉搏测量仪,控制单元选择STC15F2K60S2单片机,传感器选择反射式光电对管ST188,利用人体指腹血液透光性不一样的特性,让传感器接收不同信号从而间接测量人体脉搏,OLED12864液晶显示器实时显示脉搏数据,使用STC15F2K60S2芯片内部EEPROM实现数据存储功能,将之前测得的数值存储起来,与新测得的脉搏进行对比,便于观察出人体脉搏的变化。用LabVIEW设计上位机软件
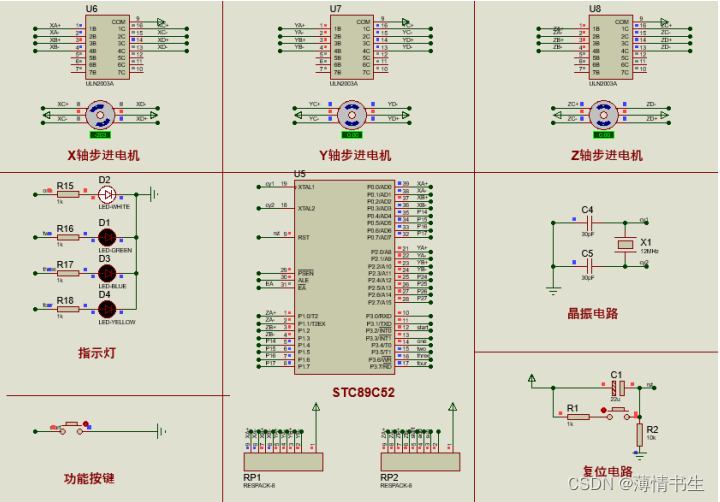
本设计采用STC89C52单片机为系统控制器单元,利用LED灯指示物体搬运状态,通过驱动器ULN2003驱动步进电机执行相应动作。51单片机通过IO口控制ULN2003驱动器来驱动步进电机实现相应动作。通过改变步进电机的通电顺序,可以改变它的运动方向。步进电机正转时的通电顺序为A-AB-B-BC-C-CD-D-DA,反转时的通电顺序为A-AB-B-BC-C-CD-D-DA。此外,通过改变步进电机的
本篇文档从OpenMV资料导航、OpenMV简介、OpenMV IDE使用、OpenMV理论基础,以及OPenMV两个案例讲解(小球追踪、植保飞行器视觉设计)引领初学者零基础入门OpenMV。图1-1 OpenMV星瞳科技官网二、Open...