




- @weixin_52247452
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
QT是一个跨平台的C++开发库,主要用于开发图形界面程序。简而言之,就是用来做UI界面的。下边笔者将介绍QT的基础用法,包括信号与槽机制、常用控件以及多线程。建议大家在学习QT时,先掌握QT的用法即可,不用深究原理。信号(signal)指的是在特定情况下被发射的事件。比如说你在QT窗口里创建了一个按钮,点击这个按钮就会发送一个信号,然后界面窗口会对你所发送的信号进行响应。槽(slot)就是对信号响
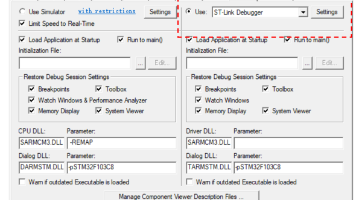
以上就是利用vscode进行gdb图形化调试的讲解,在博主的工作中而言,对于嵌入式Linux,百分之90采用的是打印日志调试,剩下百分之10使用gdb调试,建议大家两种调试方法都要会。本次分享就到这里,后边笔者的嵌入式Linux项目预计7月初会上线,有需要的粉丝朋友可以联系笔者。
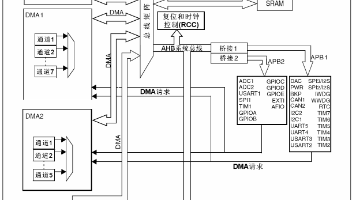
众所周知,代码会经过预处理、编译、汇编及链接四个阶段,最终被编译成可执行文件(二进制机器码)。根据启动方式的不同,决定了代码从哪块内存进行读取。一般而言,代码下载后都存储在Flash闪存中,即最终编译后的可执行文件是存储在Flash中,但flash中的代码是怎么被CPU读取并执行的呢?本文将从int a=0;a+=1;这两行代码如何在基于CM3内核的STM32F103处理器中运行来进行分析。
编码器是一种能将直线位移、角位移数据转换为脉冲信号、二进制编码的设备。它本质上就是一个传感器,可以把角位移或直线位移转换成电信号,并反馈给控制器,使控制 器知道当前机械运动的位置、角度等信息。编码器常用的有磁电增量式、光电增量式以及光电绝对式三种,本篇文章主要讲解磁电增量式编码器,其原理是:利用霍尔效应,将位移转换成计数脉冲,用脉冲个数计算位移和速度。如下图所示:由图可见,磁电增量式编码器的结构包
电机控制是嵌入式领域中一个前景广阔的专业方向。然而,面对繁杂的理论与实践,许多初学者常常感到无从下手。因此本篇文章将以STM32的标准库驱动直流有刷电机为例,分享一些电机控制的基础知识,希望可以给大家做一个参考。
在做项目时,百分之三十的时间写代码,还有百分之70的时间用于调试。本期将以Keil为例进行调试章节的讲解,目的在于做出一个标准化的调试步骤,方便大家学习如何调试代码。内容分为基础调试、中级调试及进阶调试三部分,本次主要讲解基础调试。
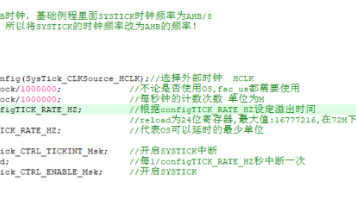
当RTOS运行的时候,delay_ms函数将先判断延时时长是否大于等于1个RTOS时钟节拍(fac_ms),当大于这个值的时候,就通过调用OS的延时函数来实现(此时任务可以调度),不足1个时钟节拍的时候,直接调用delay_us函数实现(此时任务无法调度)。ps:需要stm32+rtos项目源码,或者FreeRTOS开发手册,请联系1840813505@qq.com,备注csdn。
当多个任务共享一个互斥量时,如果高优先级任务试图获取已被低优先级任务持有的互斥量,高优先级任务将进入阻塞状态。若此时有一个中等优先级的任务就绪,它会抢占CPU,导致低优先级任务无法释放互斥量,从而间接阻塞高优先级任务,形成优先级反转。临时提升互斥量持有者的优先级,使其尽快运行并释放资源,之后恢复其原始优先级。uxPriority:任务当前优先级(可能因继承而提升):任务原始优先级(未继承时的值):
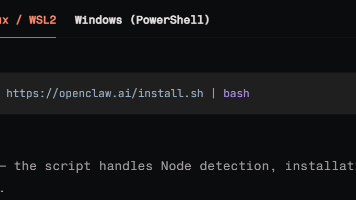
通俗一点,openClaw就是一个AI助手,能像真人一样操作你的电脑和软件,替你自动完成各种工作任务,比如帮你发邮件等等,接下来介绍一下windows系统的安装教程。
众所周知,代码会经过预处理、编译、汇编及链接四个阶段,最终被编译成可执行文件(二进制机器码)。根据启动方式的不同,决定了代码从哪块内存进行读取。一般而言,代码下载后都存储在Flash闪存中,即最终编译后的可执行文件是存储在Flash中,但flash中的代码是怎么被CPU读取并执行的呢?本文将从int a=0;a+=1;这两行代码如何在基于CM3内核的STM32F103处理器中运行来进行分析。