




- @weixin_46204734
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
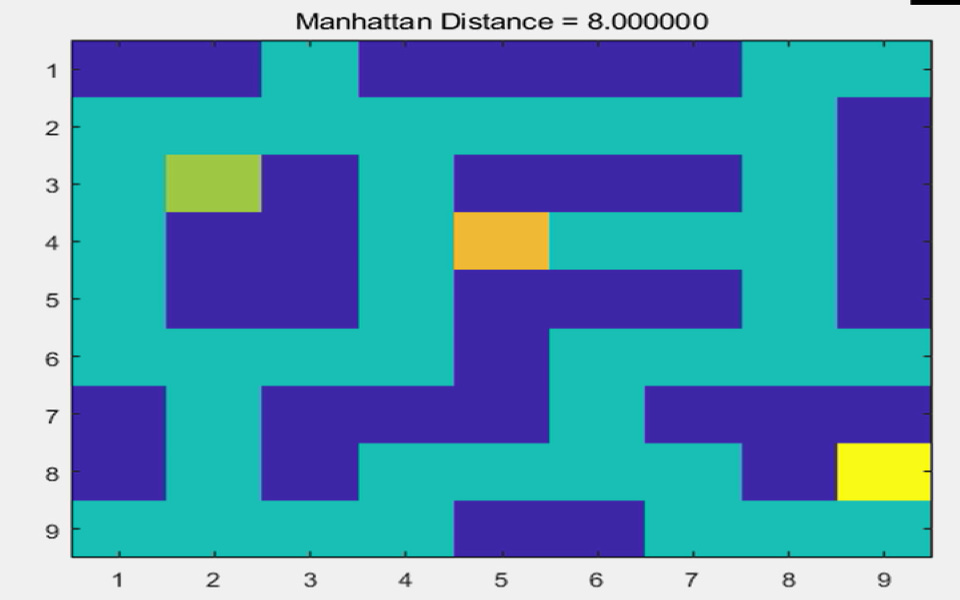
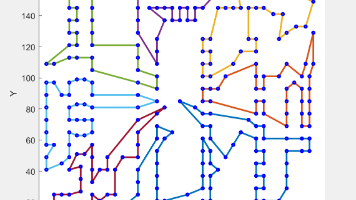
强化学习(Reinforcement learning,RL)求解机器人路径规划MATLAB
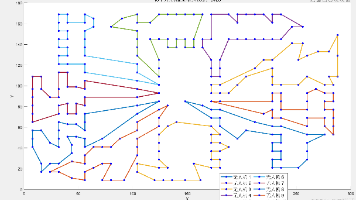
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为目标点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm艘无人艇,每艘无人艇从各自起点(可相同或不同)出发,访问若干目标点后返回起点。路径规划的目标是将VVV划分为mmm个非空子集S1。
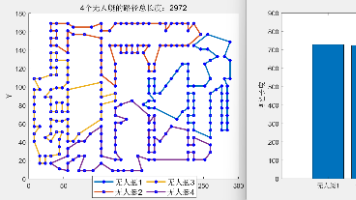
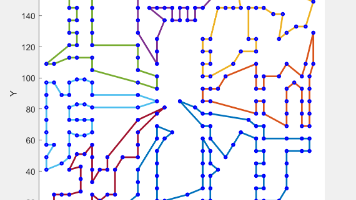
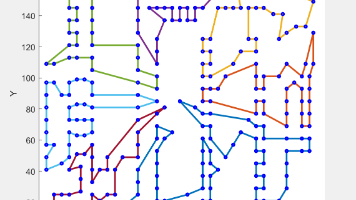
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为目标点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm台机器人,每台机器人从各自起点(可相同或不同)出发,访问若干目标点后返回起点。路径规划的目标是将VVV划分为mmm个非空子集S1。
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为目标点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm架无人机,每架无人机从各自起点(可相同或不同)出发,访问若干目标点后返回起点。路径规划的目标是将VVV划分为mmm个非空子集S1。
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为目标点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm台机器人,每台机器人从各自起点(可相同或不同)出发,访问若干目标点后返回起点。路径规划的目标是将VVV划分为mmm个非空子集S1。
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为客户点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm辆配送车辆,每辆车辆从各自配送中心(可相同或不同)出发,访问若干客户点后返回。路径规划的目标是将VVV划分为mmm个非空子集S1。
考虑一个完全无向图GVAG = (V, A)GVA,其中V12nV12n为客户点(或节点)集合,AAA为可行路径边集。每条边ij(i, j)ijdijxi−xj2yi−yj2(1)\tag{1}dijxi−xj2yi−yj21设共有mmm辆配送车辆,每辆车辆从各自配送中心(可相同或不同)出发,访问若干客户点后返回。路径规划的目标是将VVV划分为mmm个非空子集S1。
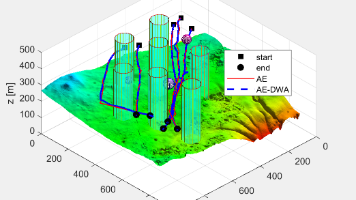
摘要:本文提出了一种基于阿尔法进化(AE)算法的多无人机三维路径规划方法。AE算法通过自适应基向量和随机步长设计实现高效优化,具有快速收敛、无特殊超参数等优势。无人机路径规划综合考虑路径长度、安全性、飞行高度和平滑度等成本因素,采用动态窗口法实现动态避障。实验结果表明,该方法能有效规划多无人机协同路径,实现安全高效的飞行轨迹。视频演示验证了算法在实际避障场景中的有效性。
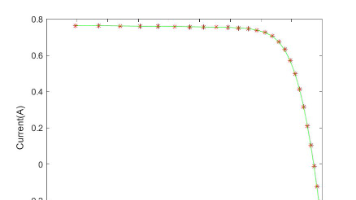
本文研究了四种光伏模型(单二极管SDM、双二极管DDM、三二极管TDM和组件模型MM)的参数估计问题。通过建立非线性电流-电压特性方程,以均方根误差(RMSE)为目标函数进行参数优化。SDM是最简模型(5参数),DDM增加一个二极管提高精度(7参数),TDM进一步引入第三个二极管(9参数)以模拟商用电池特性,而MM则考虑电池串并联结构。研究采用山羊优化算法(GOA)进行求解,通过30种群规模和20
强化学习(Reinforcement learning,RL)求解机器人路径规划MATLAB