




- @weixin_45905610
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章对水母喷水推进的运动方式进行建模,设计了仿生水母的机械结构,并重点设计了基于单片机的控制系统,完成了基于单片机的仿生水母水下机器人的设计,具有一定的应用价值。

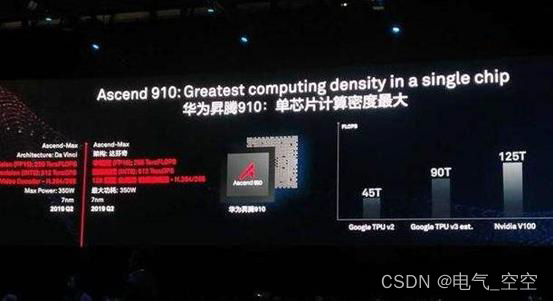
自动驾驶汽车的智能化取决于算法,因此有软件定义汽车的概念出现并且大为盛行,但是要想实现软件定义汽车,必须要有一个可以承载高度智能化且运算量庞大的AI算法的硬件计算平台或者叫域控制器,而无论是硬件计算平台还是域控制器,都离不开芯片。自动驾驶从L0到L5,随着功能的完善和性能的提升,带来更好的智能和科技体验的同时,也对AI芯片的算力和性能提出更高的需求。之前的文档曾提到,L2或者说ADAS需要的AI计
针对传统工业机器人控制系统存在的柔性差、集成度低等问题,提出了一种基于可编程逻辑控制器(PLC)的工业机器人控制系统设计方案。该方案采用模块化设计思路,通过PLC实现运动控制、轨迹规划、信号处理等功能,并选用高性能伺服驱动系统和传感器,构建了一套高度集成、实时性强的机器人控制系统。
本文设计了一种基于单片机 STC89C52 的电子指纹密码锁控制系统,其由硬件和软件组成。 硬 件 采 用STC89C52 芯片作为控制核心,结合光学指纹识别模块 FM-206,并辅以液晶显示模块、键盘输入模块、开锁控制电路和报警电路等。 软件包括系统的初始化设置和工作过程所有操作的程序。

HAVP(Home Automated Valet Parking assist),即记忆泊车功能,是泊车辅助功能的更高级拓展应用,旨在辅助客户在一些特定场景下,代其停到他想要停的位置,整个过程不需要客户在车内进行车辆控制等操作,但出于安全考虑,需要客户在距车辆一定范围内,通过手机 APP 保持系统实时处于激活状态,并监控系统的运行状态,必要时可主动采取制动等安全操作。此功能由三个子功能构成,分别

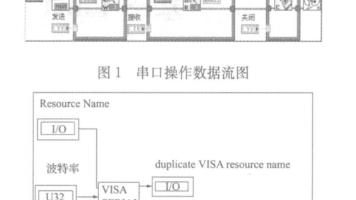
LabVIEW 是 NI 公司开发的图形化编程开发平台, 具备强大的实时数据处理功能与显示功能。通常情况下, 在 LabVIEW 开发环境中进行串口通信使用 VISA 和 ActiveX 控件两种方式均可以进行, 通过结合实例比较, 发现 VISA 方式只能提供查询缓冲区方式接收数据, 这需要占用大量的 CPU 时间, 且实时性不佳。相对而言, 使用微软提供的 MSCOM M32 控件的中断函数处
人工纸质记录流程的模式已不再适应高效率的运作环境。基于此,本文结合当下 仓储行业随着现代物流技术的应用的蓬勃生长,在当前生产制造业数智化影响力的驱动下,传统仓储系统由 PLC 控制技术与智能仓储操作过程中的要点,设计了一套采用 也可以作为 PLC 的实训案例,多维度锻炼 TIA 18 软件,运用 PLC SCL 的编程水平,充分发挥智能设备在模拟设计、工业生产中的运用。 语言模拟控制智能仓储的程序
随着产品的不断迭代,外部停车场的铺开,PAVP车辆需要应对的场景将越来越复杂,因此整体算法泛化能力的提升显得尤为关键。为了打磨巡航规划的能力,算法架构应当设计的更为灵活,可以针对使用场景迁入更为先进有效的算法,同时也可以更好的结合现有成熟的仿真平台进行算法的离线调优;此外考虑到产品的设计需求以及硬件算力的限制,算法性能的优化也是十分重要的课题。

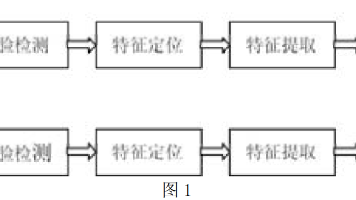
基于 Labview/Matlab、usb 摄像头软硬件等设备,设计出人脸识别系统。文章着重介绍了人脸自动识别系统的设计思想和实现技术。该系统以人像识别技术为核心,采用简单的单机模式,建立和维护了一个含有人像特征的综合数据库,从而能够在即时采集人脸图像时,迅速地查询出最接近于已采集到的的已登记人员的身份信息。
LabVIEW 是 NI 公司开发的图形化编程开发平台, 具备强大的实时数据处理功能与显示功能。通常情况下, 在 LabVIEW 开发环境中进行串口通信使用 VISA 和 ActiveX 控件两种方式均可以进行, 通过结合实例比较, 发现 VISA 方式只能提供查询缓冲区方式接收数据, 这需要占用大量的 CPU 时间, 且实时性不佳。相对而言, 使用微软提供的 MSCOM M32 控件的中断函数处