
写文章




- @weixin_45657478
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Win11安装wsl2及深度学习环境配置(Win10应该类似)
Win11安装wsl2及深度学习环境配置
mmdetection3d分布式训练(多卡训练)
mmdetection3d分布式训练(多卡训练)
复制粘贴数据增广/GT增广与mmdetection3d中的实现(dbsample)
复制粘贴数据增广/GT增广与mmdetection3d中的实现(dbsample)
【论文笔记】GaussianPretrain: A Simple Unified 3D Gaussian Representation for Visual Pre-training in Auton
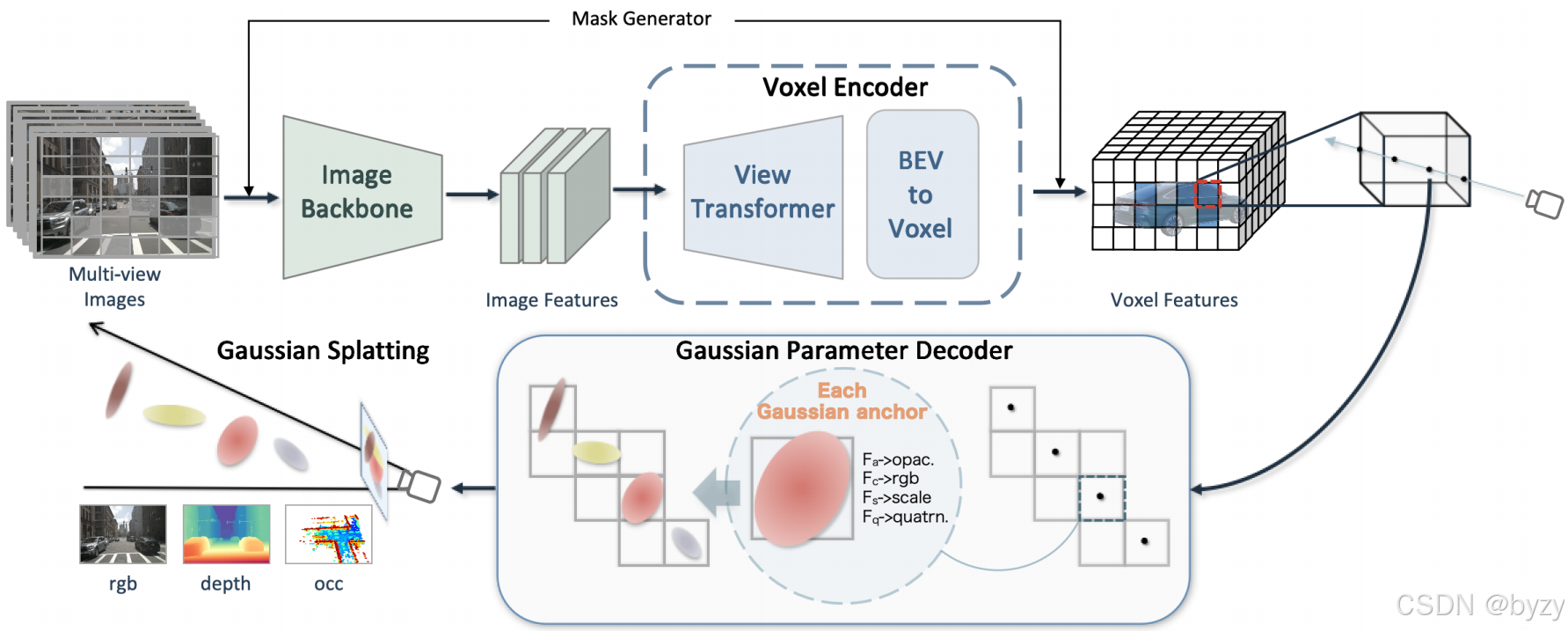
【论文笔记】GaussianPretrain: A Simple Unified 3D Gaussian Representation for Visual Pre-training in Autonomous Driving
【论文笔记】GaussianPretrain: A Simple Unified 3D Gaussian Representation for Visual Pre-training in Auton
【论文笔记】GaussianPretrain: A Simple Unified 3D Gaussian Representation for Visual Pre-training in Autonomous Driving
8种视觉Transformer整理(上)
本文介绍4种视觉transformer,包含ViT、CoAtNet、CoT、CSWin。
8种视觉Transformer整理(下)
本文介绍4种视觉transformer,包含Focal Transformer、Swin Transformer、ResT、VOLO。
7种视觉MLP整理(下)
本文介绍三种视觉MLP,包含RepMLP、ResMLP和S²-MLPv2。