




- @weixin_44690490
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
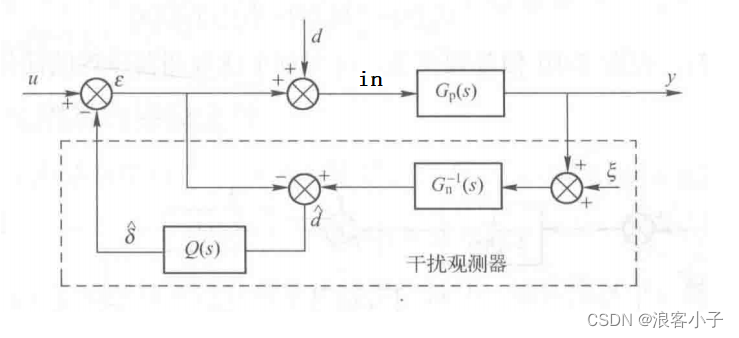
所谓被控对象的名义模型,就是说,实际被控对象无论是通过系统建模还是系统辨识,都无法获得十分精确的参数,名义模型就是与实际系统模型相近的模型,可近似二者相同,即则。
在VS编译器上编写的程序都会生成一个exe文件,有时候写了一个很装逼的程序想在别人电脑炫耀一下,奈何将这个exe文件拷贝过去并不能运行,直接宣告装逼失败。为此将介绍一下如何将生成的exe文件在其他电脑上运行,步骤如下:1、在编译界面点击项目选项卡,在下拉菜单中选择属性。2、点击属性后便会打开下图的窗口,点击配置属性的常规,在右侧的表中平台工具集处选择Visual Studio 2013...
上节讲到贴出一张图片的过程,本节接着介绍一些基本的图形库函数。1、图形窗口背景颜色设置函数:例setbkcolor(YELLOW);将图形窗口背景颜色设置为黄色。也可用setbkcolor(RGB(180,24,137));利用三原色设置颜色,RGB(红,绿,蓝),每种颜色的取值范围为0—255,RGB(180,24,137)的意思就是说红:绿:蓝=180::24:137.2、打印文字函数:o..
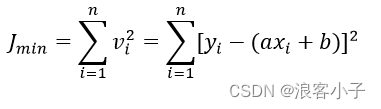
最小二乘法是通过输入数据与输出数据来拟合已知结构的函数关系,也就是说已知二者的函数关系,通过最小二乘法估计函数的相关参数。假设xy存在以下函数关系:但是在实际中,测量数据时存在测量误差或者噪声影响,故而实际的函数关系为v表示测量误差,这是一个小范围内的随机值。将所有测量误差相加我们以测量误差的平方和最小代表测量总误差最小,即用求极值的方法使J对ab求一阶导并等于0解方程组得。
在中,得到了小电机的传递函数以这个电机为例展开开环零点与闭环零点对电机响应的影响。系统中极点是影响系统动态性能以及稳定性的主要因素,这里不做赘述。
在C语言的学习过程中,接触最多的就是黑乎乎的DOS窗口,这也是在消磨学习者的兴趣,学到最后可能还不知道C语言到底能做什么,难道就是输入输出数据吗?当然不是,C的用处很广泛,这里不做讨论。我们能不能用C语言做些好玩的东西,当然可以,我们可以做游戏,可以做动画,还有很多能装逼的东西,在外行眼里看来,你的逼格高的就不是一点点了。做游戏、做动画一定要用到图片、音频等,怎么用C语言显示出来呢?这里我们就要用
注: Rn与Ri中n=0 ~ 7,i=0 ~ 1内部数据传送指令助记符作用寻址方式机器周期字节数MOVA,Rn将Rn的内容传送给A寄存器11MOV A,directdirect是一个地址单元,将该地址的内容传送给A直接12MOV A @RiRi中存储了一个地址,将该地址的内容传送给A寄存器间接11MOV A #data将data传送到A立即数12...
所需元件 STM32开发板、L298N一个、带编码器的直流电机一个(如下图所示,淘宝上有很多)系统框图 通过系统框图,我们需要做两件事,一是要测速,二是要调节。测速目前流行的就是通过编码器测速,调节器我采用的时PI调节,PI调节器调节的参数少,而且能够消除静差,当然用PID调节器也行。编码器 编码器的结构简化如下图: 在电机转轴上安装了一个磁环,在磁环的下方有一个霍尔传感器,在磁环转动过程

位置式PID控制算法 位置式PIDPIDPID算法是一种比较直观的的PIDPIDPID算法,如系统框图中所示,ininin表示设定值,errorerrorerror表示差值,uuu表示控制器输出值,outoutout表示被控量。算法表达式如下:增量式PID控制算法 增量式PIDPIDPID算法不比位置式更直观,当执行机构需要控制量的增量时,适合采用增量式PIDPIDPID算法,比如步进电机控制
一、引脚:图1.1这里只介绍常用及主要的引脚。I/O口引脚:P0、P1、P2、P3P0口:39脚~32脚,双向8位三态I/O口,每个口可独立控制,但内部无上拉电阻,为高阻态,故不能正常输出高低电平,使用该口时通常连接10K的上拉电阻。P1口:1脚到8脚,准双向8位I/O口,每个口可独立控制,内带上拉电阻,该口在作为输入使用前需先写入1,此时单片机才可正确读出外部信号,故而称准双向口。...