




- @weixin_44226356
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
导出的机器人模型是封装好的proto文件,不能在Webots界面里直接添加Webots内置的测距仪、相机、LED等设备(device),需要手动修改proto文件。
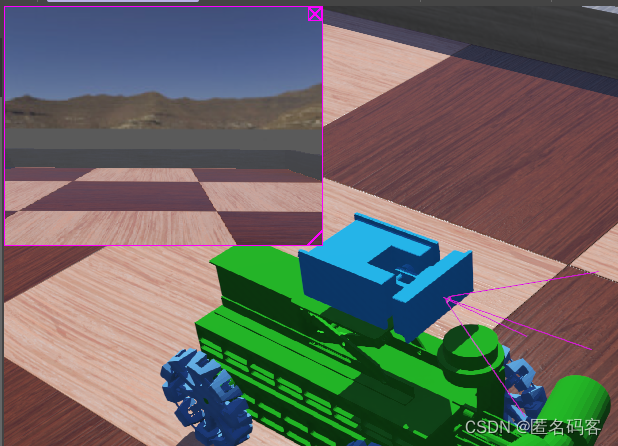
**目标**:把Solidworks的机器人模型导入Webots,保存运动副关系,导入后直接控制。**工具链**:使用SW2URDF插件导出URDF文件,然后使用python - urdf2webots模组,生成proto文件导入Webots。**提示**:工具链不成熟,中途需要手动修改文件(2023年6月)。程序版本很重要,影响兼容性和用法。详见正文。
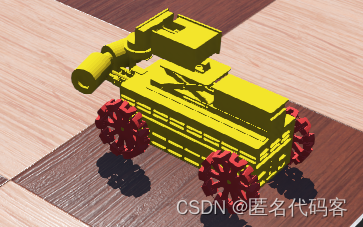
导出的机器人模型是封装好的proto文件,不能在Webots界面里直接添加Webots内置的测距仪、相机、LED等设备(device),需要手动修改proto文件。
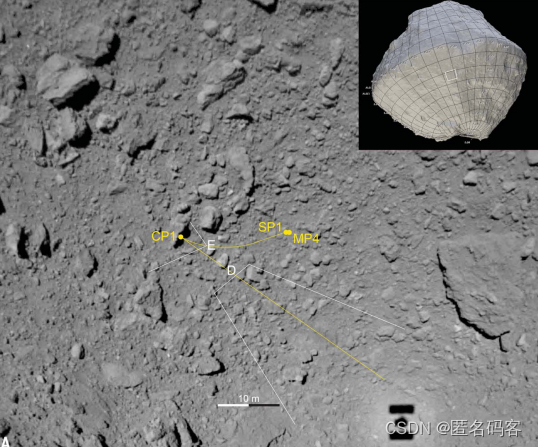
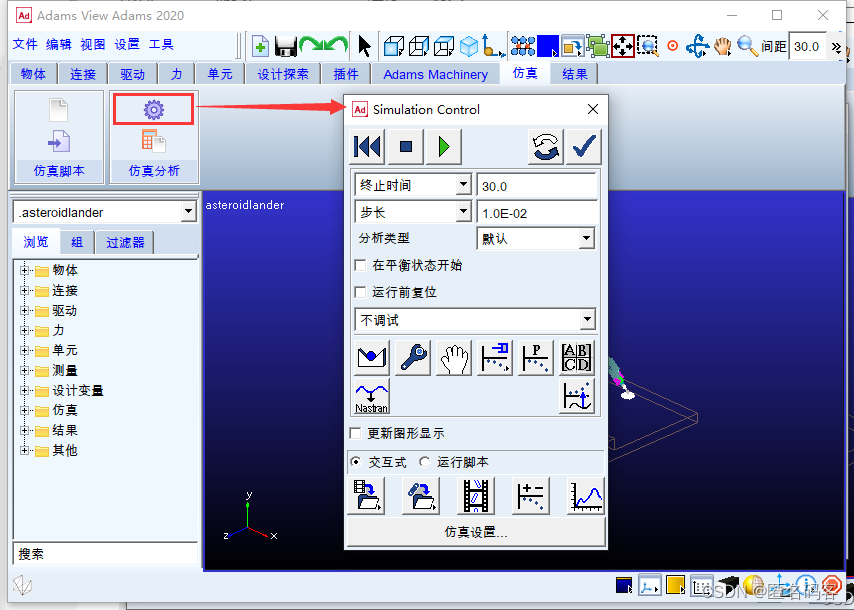
在使用ADAMS进行机器人仿真过程中,可能需要一个崎岖的地表模型来验证机器人的通过能力。本文记录了如何从网上搜索二维地表模型,生成三维OBJ模型,然后导入ADAMS,赋予质量属性,并与仿真中其他物体进行交互。然后添加约束,把地面模型跟ground固定在一起,固定位置选择质心,避免仿真时候出错。回到导入文件窗口,输入缩放比例Scale Factor,第一次导入可以先不填,后面重新导入的时候再调整。模
注意右边有个“浏览”复选框,选中的话就会实时刷新“测量”里选择的变量,适合快速查看曲线。不勾选的话,要点“添加曲线”才能绘制所选变量,这时候可以在同一个绘图里显示多个曲线,适合对比,出图,或导出数据。也可以选择“对象”,可以直接绘制某个对象的数据,不用在View里添加测量了。录像之前最好打开“录像”标签页,设置画面尺寸和帧率,如下图。默认情况下,每个页面只包含一个绘图,右键工具栏右边的“页面布局”
进入学校系统,在“研究生国际交流”中提交总结材料,提交即可,学校领导会在之后给纸质材料盖章时现场审核。
STM32F103:串口+DMA,定时器内部中断、PWM输出、输入捕获,ADC+DMA,GPIO
开发机器人过程中经常需要用牛顿-拉格朗日法建立机器人的动力学模型,表示为二阶微分方程组。本文以一个二杆系统为例,介绍如何用MATLAB符号工具得到微分方程表达式,只需要编辑好物点的运动学公式,和系统动能和势能,就能得到微分方程组,避免手工求导的繁琐和容易出错的问题。

Zotero可以在Word中自动生成IEEE格式的引文条目,但是格式不对,主要是:(1)会自动添加URL或DOI,是不需要的(2)期刊/会议名称采用全名,需要改为简称比如原来生成的:这是一个期刊论文,不需要DOI,且期刊名称需要用简称。这是一个会议论文,不需要最后的网址,且需要用会议简称。
照着网上教程做了还是失败的,建议来看