




- @weixin_41756645
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这一步可能会报错update-alternatives: error: no alternatives for python。

【一】旋转矩阵、变换矩阵、欧式变换旋转矩阵坐标系间的欧式变换功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入旋转矩阵内积
由于项目需要,需要使用到树莓派输出PWM控制舵机,因此采用了几种不同的方案,效果都不太一样,在此记录一下。因为使用的是树莓派的引脚来输出PWM所以要使用控制树莓派引脚的一些库,WiringPi只是其中的一种,此外还有gpiozero、pigpio等库,据说pigpio是可以在ubuntu20.04下正常使用的库,言外之意就是其他两个库多多少少可能有点问题,但是我在使用WiringPi时大部分功能也
昨天,因突然想从我的电脑的ubuntu系统里面拷点东西出来(我的电脑是双系统win11+ubuntu20.04),而突然想到自从windows系统升级成win11之后再也没有在开机时有选择系统的这个页面,因此我想调出来这个页面。(经历了一次把win11的系统引导删除后进不去win11才发现其实很好实现,一会唠唠有多蠢的人才会绕一大圈。。。)至于为什么能接触到这个软件是因为我参考了这个连接结果在里面
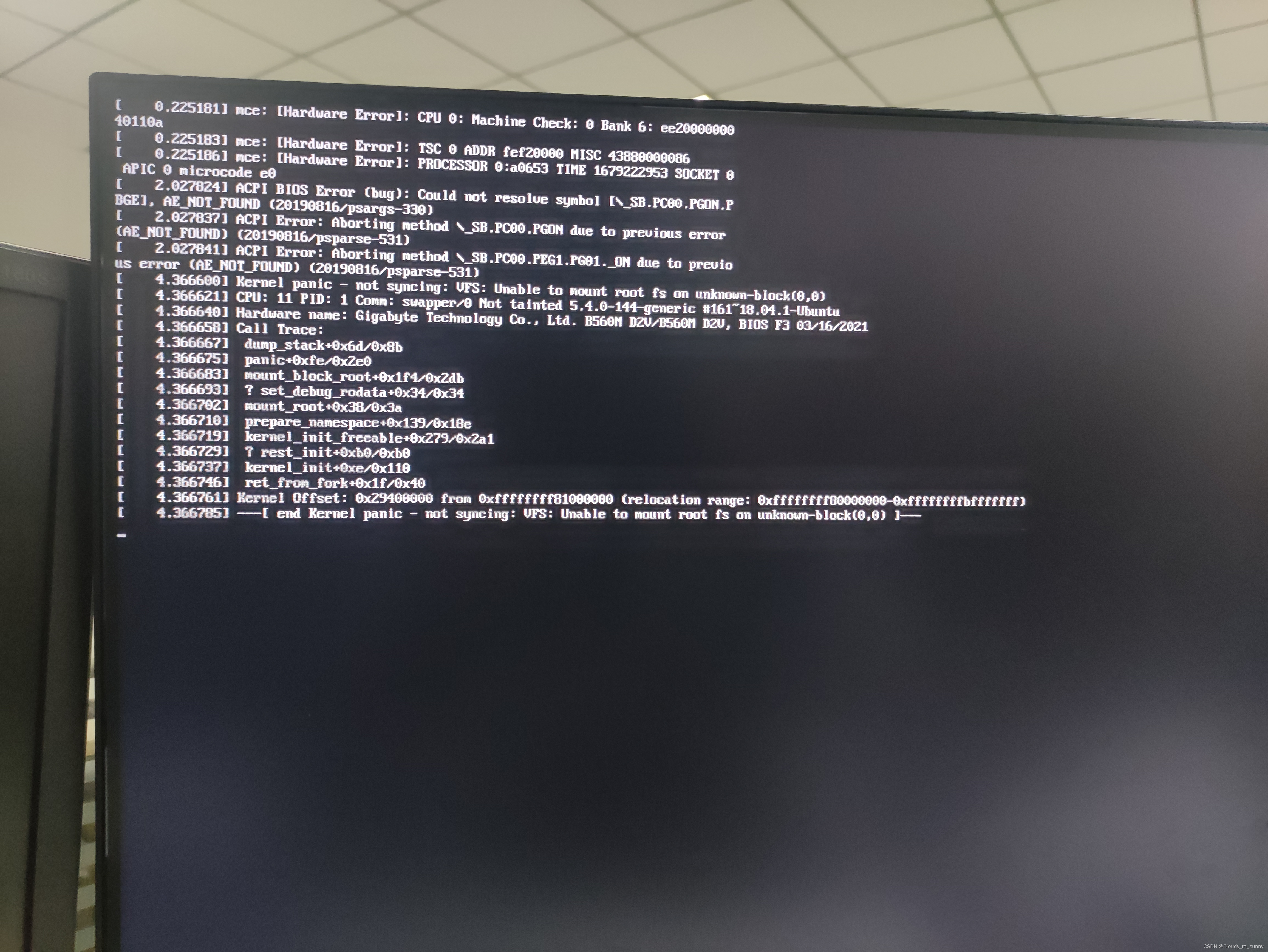
[TOC](ubuntu启动报错 hardware error cpu 0 machine check 0 Bank 6、ACPI BIOS Error (bug)Could not resolve symbol)
昨天,因突然想从我的电脑的ubuntu系统里面拷点东西出来(我的电脑是双系统win11+ubuntu20.04),而突然想到自从windows系统升级成win11之后再也没有在开机时有选择系统的这个页面,因此我想调出来这个页面。(经历了一次把win11的系统引导删除后进不去win11才发现其实很好实现,一会唠唠有多蠢的人才会绕一大圈。。。)至于为什么能接触到这个软件是因为我参考了这个连接结果在里面