- @weixin_41691854
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【代码】CRN源码详细解析(4)-- 图像骨干网络之DepthNet。
黑色的样本是非核心对象。从接收到点云开始,先对点云做标定、坐标转换、噪点剔除、动静分离,再分别对动态目标和静态目标做聚类,然后根据聚类结果做目标的特征分析和检测等,之后对符合条件的聚类结果做目标起始、关联和跟踪等处理,输出目标结果。其中,ϵ描述了某一样本的邻域距离阈值,MinPts描述了某一样本的距离为ϵ的邻域中样本个数的阈值。有了朝向之后,可以计算聚类点云在朝向方向上的投影,从而计算长宽,这样聚
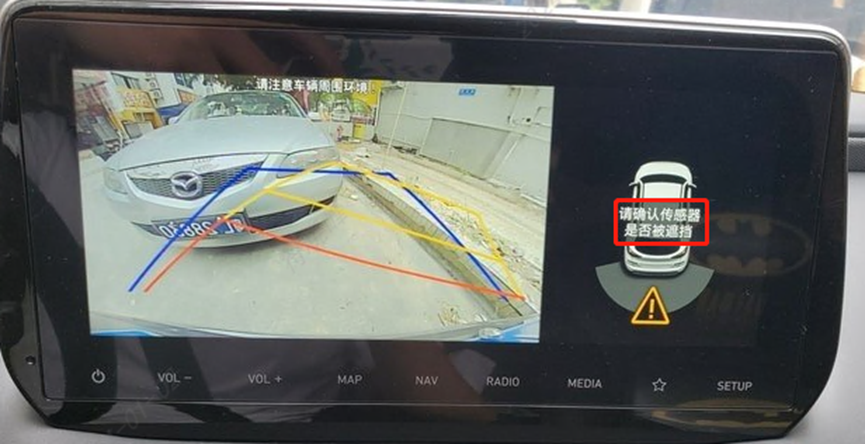
本发明通过对毫米波雷达的各通道时域回波信号的FFT的幅度变化特征进行统计分析,以对毫米波雷达的遮挡情况进行判断,从而有效地实现了车载毫米波雷达的遮挡状况检测,同时,该方法对算力要求较低,在保证了车载毫米波雷达系统对环境的实时感知的同时,也满足车载毫米波雷达自诊断功能的实时性。本发明的雷达视野受限场景识别方法适宜应用于装载在可移动设备上的雷达,充分考虑了全视野受限场景可能存储的情况,有效地实现了雷达
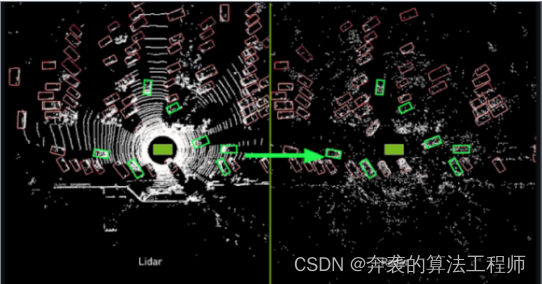
障碍物检测是安全高效自动驾驶的关键。为此,我们提出了NVRadarNet,一种深度神经网络(DNN),利用汽车雷达传感器检测动态障碍和自由空间。该网络利用来自多个雷达传感器的时间累积数据来检测动态障碍物,并在自上而下的鸟瞰视图(BEV)中计算它们的方向。该网络还回归可驾驶的自由空间,以检测未分类的障碍。我们的DNN是第一个利用稀疏雷达信号,仅从雷达数据实时执行障碍物和自由空间检测的同类产品。
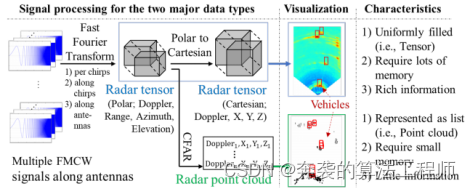
与使用可见光波段(384 ~ 769 THz)的RGB相机和使用红外波段(361 ~ 331 THz)的激光雷达不同,雷达使用波长相对较长的无线电波段(77 ~ 81 GHz),因此在恶劣天气下也能进行可靠的测量。遗憾的是,与现有的相机和激光雷达数据集相比,现有的雷达数据集只包含相对较少的样本。这可能会阻碍基于雷达感知的复杂数据驱动深度学习技术的发展。此外,大多数现有的雷达数据集只提供3D雷达张量
由一系列chirp组成的扩展码(例如,+1,+1,-1,+1,-1,…受影响的DCM雷达将接收到的信号以恒定的本地振荡器频率在公共载波频率(𝑓1=𝑓c)下转换,并使用DCM双相码的延迟副本解调接收到的信号(芯片速率Δ𝑓i =1⁄𝑇c,带宽Δ𝑓v =1⁄𝑇c,假设与所示示例中的DCM干扰雷达的相应参数相同)。然而,在FMCW/FCM到FMCW/FCM干扰的情况下,干扰下变频到基带后在受害

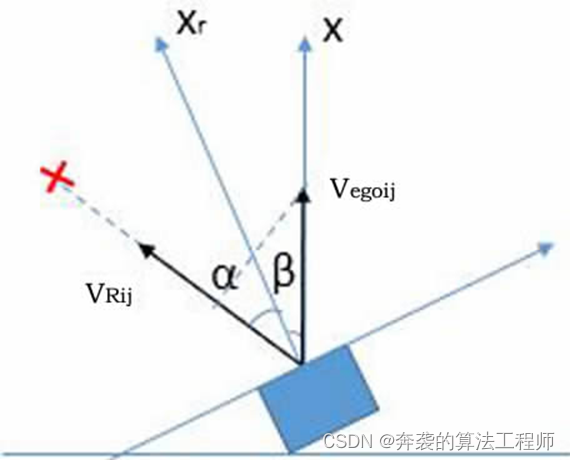
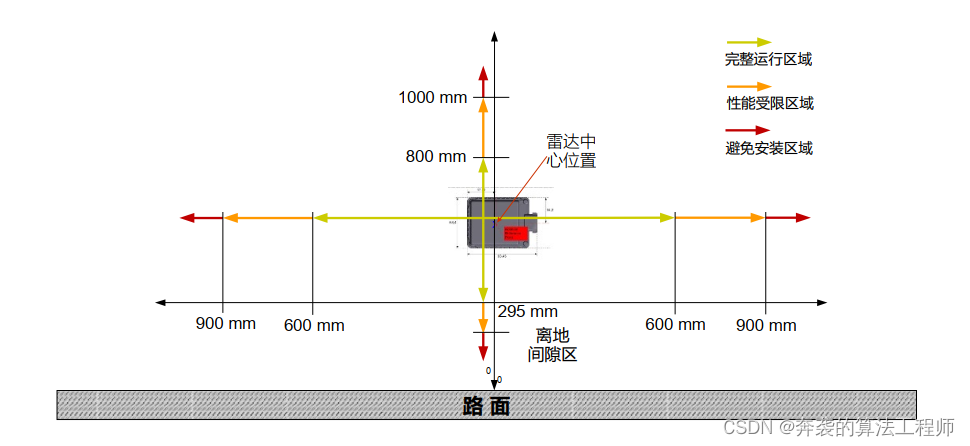
雷达安装在车辆正前方,左右偏移不超过600mm,离地高度295~800mm。图 1雷达安装位置如果安装区域超出推荐范围,则会影响雷达正常工作。同时需保证雷达视场范围内无遮挡,否则同样会影响雷达正常工作。理想情况下,雷达平面应与车辆行进方向垂直,但由于安装过程中的误差,雷达的方位角(Yaw angle、α)、俯仰角(Pitch angle、β)和滚转角(Roll angle、γ)与预期存在一定的偏差
黑色的样本是非核心对象。从接收到点云开始,先对点云做标定、坐标转换、噪点剔除、动静分离,再分别对动态目标和静态目标做聚类,然后根据聚类结果做目标的特征分析和检测等,之后对符合条件的聚类结果做目标起始、关联和跟踪等处理,输出目标结果。其中,ϵ描述了某一样本的邻域距离阈值,MinPts描述了某一样本的距离为ϵ的邻域中样本个数的阈值。有了朝向之后,可以计算聚类点云在朝向方向上的投影,从而计算长宽,这样聚
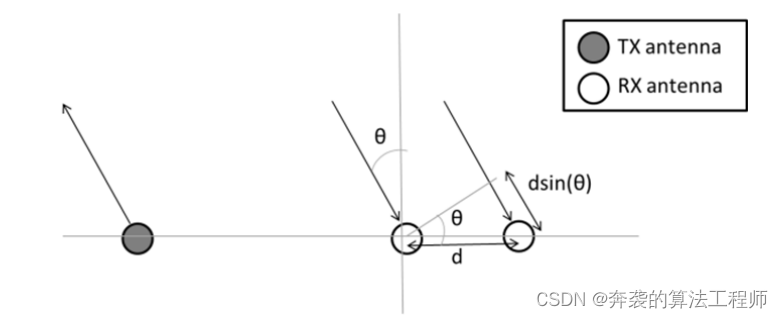
由于TX1和TX2的传输,将4个RX天线处的相序列串联起来,得到序列[0 ω 2ω 3ω 4ω 5ω 6ω 7ω],与图4中1个TX和8个RX天线的序列相同。然而,与TDM-MIMO(每个时隙只有一个TX天线是活动的)不同,所有NTX个天线在每个块的每个NTX时隙中都是活动的。在特定的接收RX天线上使用相应的接收信号(Sa和Sb),可以使用S1 = (Sa+ Sb) / 2和S2 = (Sa -
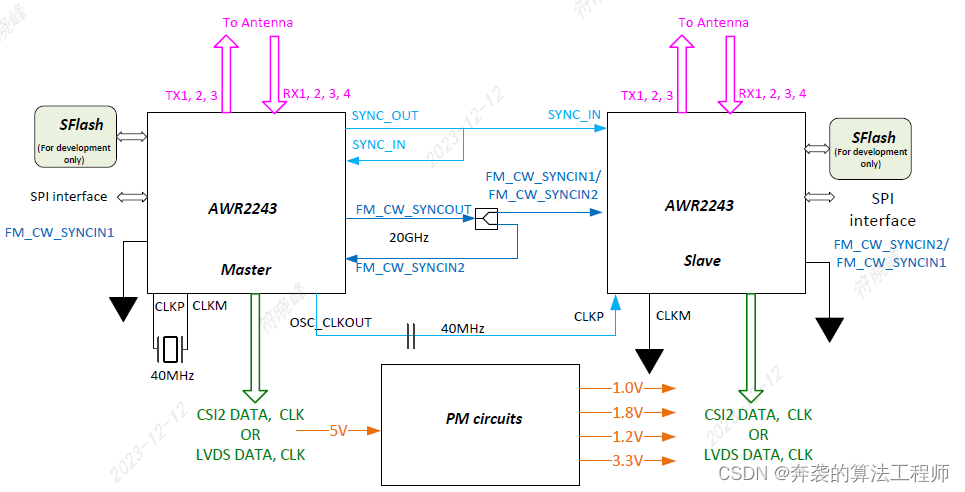
在双设备系统的情况下,这可以通过设备之间的无源走线来完成。这开始了一系列帧(与帧配置消息中编程的一样多),并且对于每个这样的帧,主设备在其DIG_SYNC_OUT引脚上产生高脉冲,该引脚通过DIG_SYNC_IN引脚导致所有芯片同步启动chirp时序、传输和接收。除了这些连接,在下面的图表中说明,并在后面的章节中进一步阐述,级联系统还具有电源管理芯片 (PMIC)(每个PMIC最多可以处理两个AW