




- @weixin_38800446
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
今天按网上资料以及官网文档引入activiti的starter,却导致项目一直启动不了,一直报数据源配置问题,导致shiro的realm也注入不了
学习阶段fork或者创建了很多仓库,现在密密麻麻,想要删除但是需要一个个寻找点击确认。删除需要多次确认这个设计本身是没有任何问题的,但是在这样的场景下却需要一个更加快捷的方案。查找之后,了解到可以通过脚本的方式调用restful api的方式来进行处理。点击查看文档:[官方restful地址](https://docs.github.com/en/rest/reference/repos#dele
目的把代码中指定规则的引号替换为反单引号,以便于使用es6的模板字符串功能修改前'/user/${userInfo.account}/files/'修改后'/user/${userInfo.account}/files/'需要使用vscode的替换功能,搜索内容为'(/user/\S+)'替换内容为`$1`这里的用法是将要替换的部分用()包裹起来,那么...
gitlab社区版:是一个开源的git管理服务器。对于团队内部项目,不想往码云和github上传时,可以考虑使用这个。docker:在现有软硬件基础之上,虚拟操作系统;通过镜像构建容器,各个容器内部有独立的操作系统,同时共享所有硬件资源。比vmware之类的虚拟机虚拟化一整个虚拟物理机要节省资源,且性能更高。反向代理:一个服务器上可能运行多个向外提供http接口或页面的服务,而80端口只有...
先来找找哪些大文件把我们的服务器空间给占了。一目了然,一个nohup.out就能占。原来还需要把进程关了才行。嗯,好,一下子释放出来了。

产品接入项目管理设备模拟器针对虚拟设备设计设备模拟器,以在虚拟状态下模拟现实场景。流程设计:在添加设备时,选择是物理设备或虚拟设备如果是物理设备,那么只能接受正常设备上传数据;如果是虚拟设备,可以进行数据模拟模拟器页面设计,功能可以简单,但是页面看起来功能比较丰富,朝着“物联网虚拟仿真平台”的方向设计。3. 拓扑图设计,以产品中上传的设备图片为核心,根据通道数据项配置联结多个传感器4. 每个传感器
最重要的问题,所以先说按一般的教程配置后,浏览器都通过了,但是微信小程序无法使用访问,这是因为微信要求证书链完整,必须引用那个`fullchain.cer`才可以。**一定要注意,引用的cer文件不能是域名位名称那个cer文件,否则微信小程序不认,必须配置为fullchain.cer才可以。这个问题坑了我太久了。文末附证书评级检测方法。

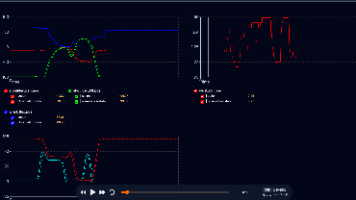
本文介绍了机器人控制中动作(Action)与观测(Observation)的核心概念,并详细解析了so101-robot机械臂在可视化工具lerobot-dataset-visualizer中的6个关节参数。这些参数包括肩部、肘部、腕部各关节的位置和夹爪开合状态,以弧度或归一化值表示。可视化工具通过实时对比动作指令和实际观测曲线,可帮助验证控制效果、分析运动过程并进行调试诊断,直观展示机器人执行任
action:是7维向量,指定机器人各关节目标位置和夹爪状态,用于控制机器人运动:是7维向量(基础配置),提供机器人各关节当前位置和夹爪状态,用于状态感知和反馈这两个组件是so101-robot与外部系统(如控制器、学习算法)交互的核心接口,共同构成了机器人的感知-决策-执行闭环。补充多个摄像头图像(observation.images)力/扭矩传感器数据(observation.force)末端
产品接入项目管理设备模拟器针对虚拟设备设计设备模拟器,以在虚拟状态下模拟现实场景。流程设计:在添加设备时,选择是物理设备或虚拟设备如果是物理设备,那么只能接受正常设备上传数据;如果是虚拟设备,可以进行数据模拟模拟器页面设计,功能可以简单,但是页面看起来功能比较丰富,朝着“物联网虚拟仿真平台”的方向设计。3. 拓扑图设计,以产品中上传的设备图片为核心,根据通道数据项配置联结多个传感器4. 每个传感器