




- @waihekor
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
多传感器融合中的时间硬同步1-论文阅读
多传感器融合中的时间同步2-论文阅读
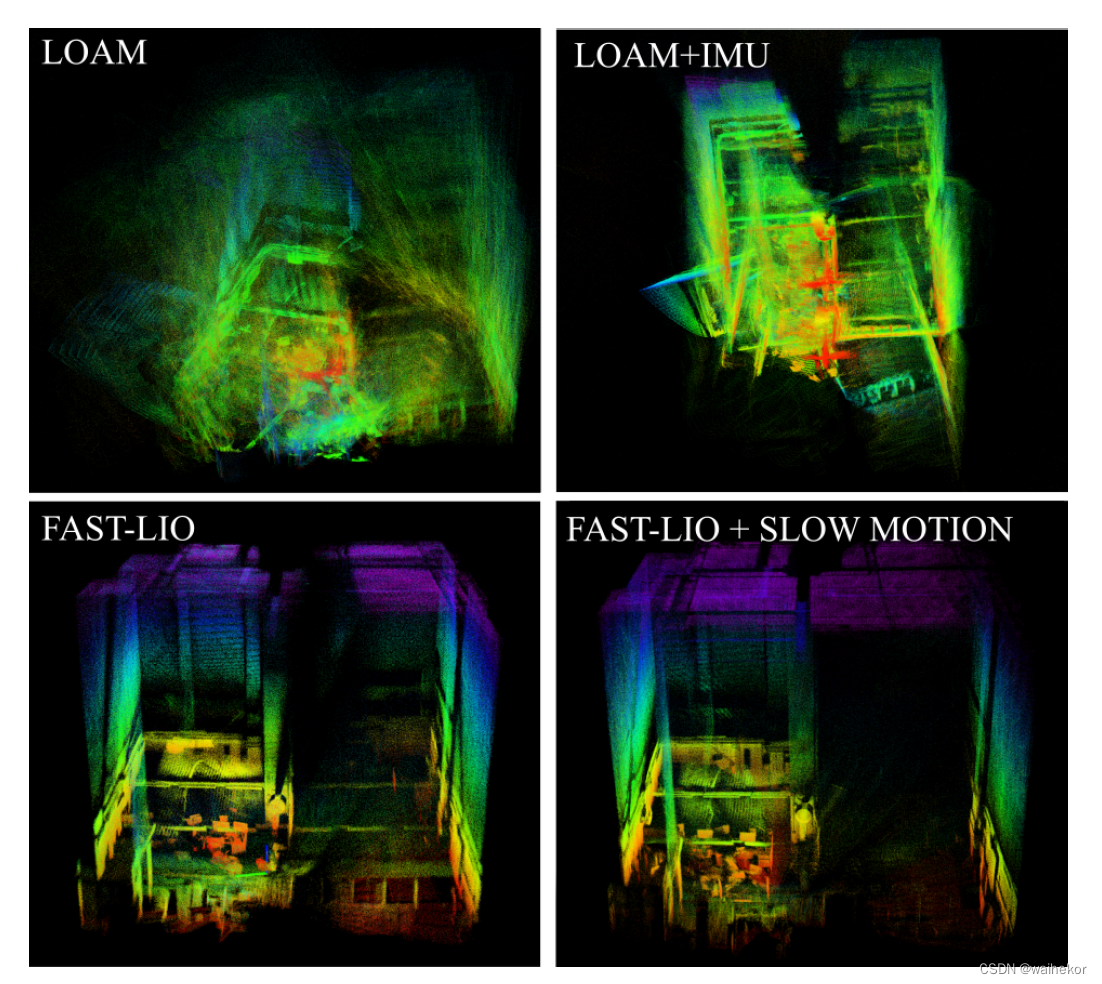
论文题目:FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter,FAST-LIO:一种基于紧耦合IKF算法的快速的,鲁棒性的激光雷达惯性里程计。
SINS/NHC组合导航(一)前言数据SINS/NHC基本原理数据验证与分析参考论文前言一般在车载SINS/GNSS组合导航中,为了提升GNSS失锁性能,可以采用融合车辆运动学约束条件辅助的组合导航算法,利用车辆正常行驶中横向和纵向速度为零的约束条件,可以提升导航算法能力。本文初步实现了SINS/NHC算法,并利用开源组合导航数据做了算法的验证。数据武汉大学开源组合导航数据数据链接如上,IMU型号
PSINS源码阅读—STIM300/GNSS组合导航
MTI-G-710/GNSS组合导航代码分析
这里写自定义目录标题Unix或POSIX时间戳GPS时间rtkcmn代码epoch2timegpst2timetime2gpstUnix或POSIX时间戳它是UNIX或类UNIX系统使用的时间表示方式。一般定义为从协调世界时(UTC时间)1970年1月1日0时0分0秒起至现在的总秒数(10位是精确到秒,13位是精确到毫秒)。考虑到闰秒的话,更精确的定义为从协调世界时(UTC时间)1970年1月1日
前言最优化问题中总会遇到多元函数的泰勒展开公式,没有推导过总是感觉很抽象,参考如下链接,文章讲得很清晰。多元函数的泰勒(Taylor)展开式推导过程一元函数在点 Xk\mathcal{X}_{k}Xk处的泰勒展开式为:f(x)=f(xk)+(x−xk)f′(xk)+12!(x−xk)2f′′(xk)+onf(x)=f\left(x_{k}\right)+\left(x-x_{k}\r...
由磁场数据和加速度数据计算初始姿态角
欧拉角和四元数之间转换公式推导