- @vHXIxsckCTh
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
实际跑起来可能会发现机器人有时会在障碍物附近震荡,这时候需要调整速度采样的分辨率,或者增加航向角对准目标的评分项。我们的代码里直接把地图矩阵当坐标系用,实际部署时需要处理地图分辨率参数。注意这里三个权重的调节技巧:障碍物距离权重最大,但实际调试中发现当目标点周围布满障碍时,需要适当提高目标权重。这里用的是最基础的运动学模型,实际可能需要考虑轮式机器人的运动约束。轨迹预测时长建议设置在2-5秒之间,
这套最初只是课程设计的系统,经过半年的实战迭代,已经在本市三个商业综合体稳定运行。【车牌识别】基于计算机视觉,数字图像处理常见实战项目:蓝色车牌识别+语音播报+GUI显示+出入库管理+计时计费+时间显示+空位显示+库内判断+车辆信息导出。步骤:车牌粗定位,灰度化,倾斜矫正,二值化,形态学处理,车牌精准定位、字符分割,模板匹配、语音播报、计时计费、空位显示、导出车辆信息。步骤:车牌粗定位,灰度化,倾
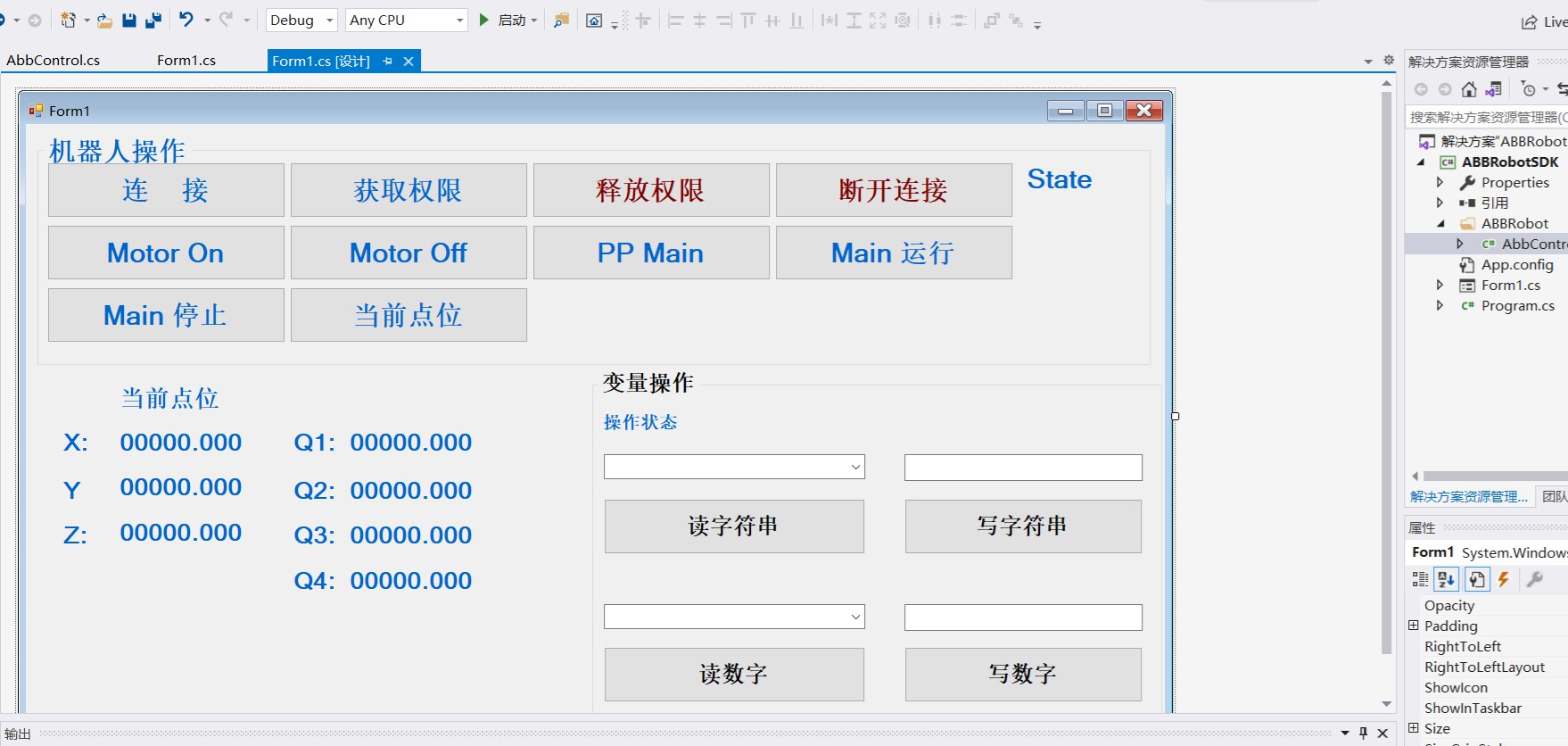
通过这种方式,利用C#结合自定义的ABB机器人类,就能轻松实现对ABB机器人点位信息的读取和写入,为ABB机器人的二次开发提供了有力支持,满足各种复杂的自动化任务需求。而二次开发能让ABB机器人更好地适配特定业务场景,今天咱们就来聊聊如何用C#实现对ABB机器人数据的读取和写入,特别是点位信息的获取与写入。首先,咱自己写了个ABB机器人类,这个类涵盖了机器人常规操作功能,为二次开发奠定了良好基础。
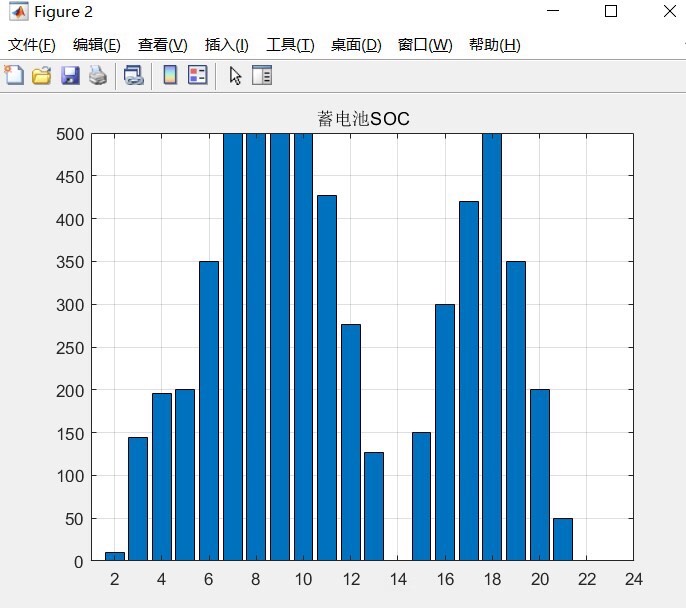
最后,我们通过对比分析发现,引入V2G技术确实可以在一定程度上替代部分蓄电池容量,从而实现光伏微网在负荷峰谷平抑、三方经济和安全等方面的进一步优化。在这个系统中,我们主要关注的是电网、微网调度中心和电动汽车用户三方的利益。主要内容:采用粒子群算法,对电网、微网调度中心和电动汽车用户三方在无、无序、转移和调度V2G电动汽车负荷四种运行模式下的经济和安全影响进行对比。主要内容:采用粒子群算法,对电网、
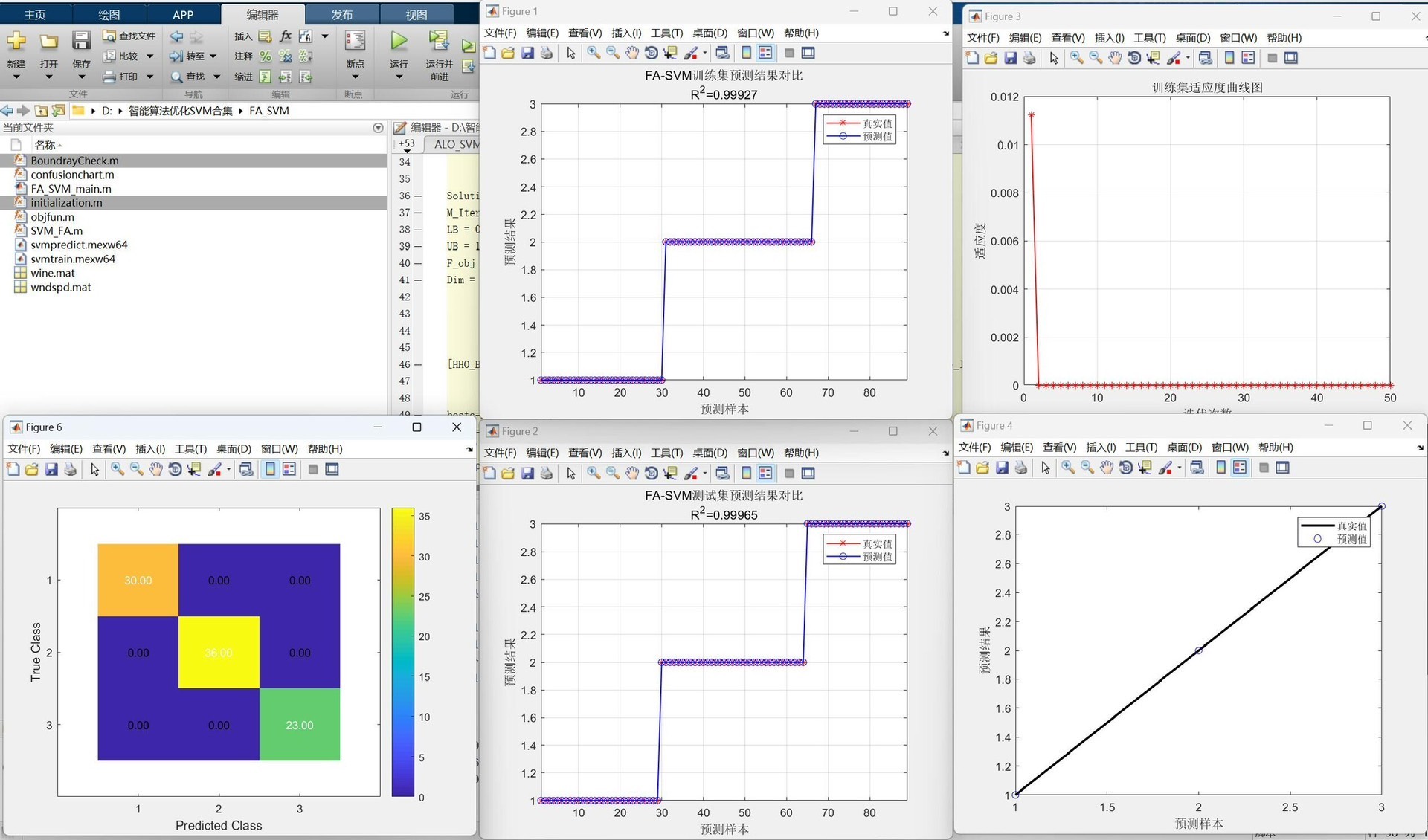
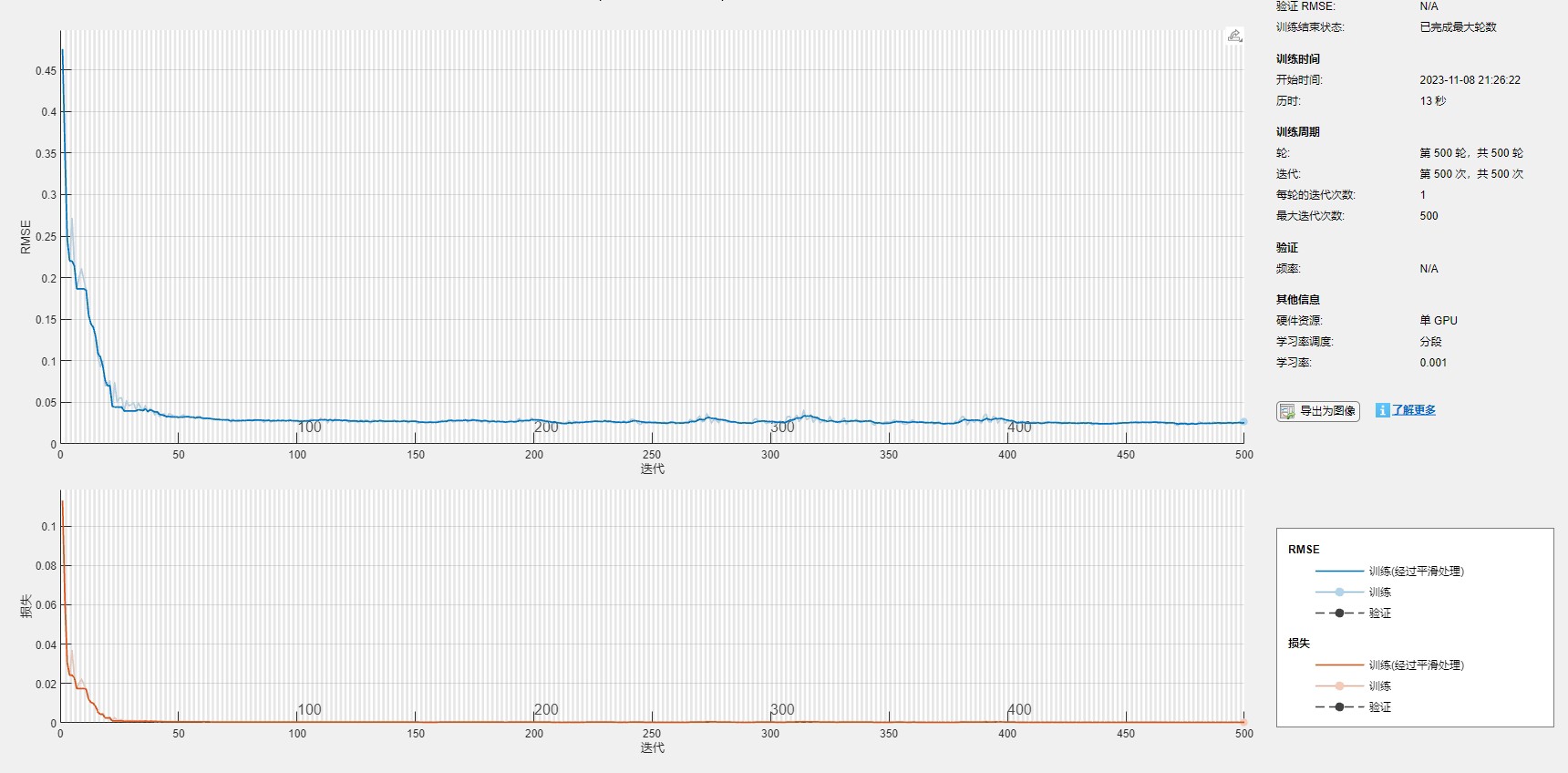
CNN(卷积神经网络):擅长捕捉数据中的局部特征。就拿图像数据来说,CNN的卷积层能通过卷积核在图像上滑动,提取诸如边缘、纹理等局部信息。在咱们的数据回归预测里,它同样能挖掘多变量数据中的局部模式。% 构建简单的CNN层layers = [这段代码构建了一个简单的CNN层结构,定义了卷积核大小为3x3,输出16个特征图,Padding设为same保证卷积后尺寸不变,reluLayer添加激活函数,
最近有个项目刚做完,客户要求位置模式下重复定位精度必须稳定在±0.02mm,压力模式误差不能超过10公斤。有次设备在山区信号弱,用边缘计算缓存数据+定时重传硬是撑过了三天断网期,这代码里的重试机制算是没白写。有个客户选了2000档的套餐,结果现场接反了电磁阀线,视频指导了俩小时才搞定,血亏。现场师傅说"你们这算法太老实",硬是加了±8公斤的预警阈值才把波动压在10公斤以内。触摸屏程序+PLC程序+

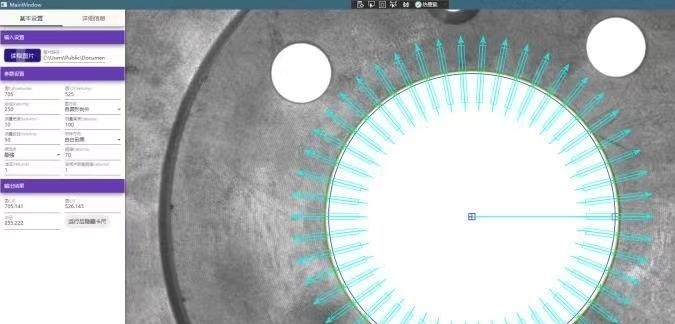
Translation枚举:定义边缘明暗转换类型,Positive(黑到白,梯度为正)、Negative(白到黑,梯度为负)、All(全部边缘),用于筛选目标边缘方向;Selection枚举:定义边缘点选择策略,包括First(第一个边缘点)、Last(最后一个边缘点)、Strongest(梯度最强点)、Weakest(梯度最弱点)、All(所有边缘点),适配不同场景下的边缘筛选需求;Info内部
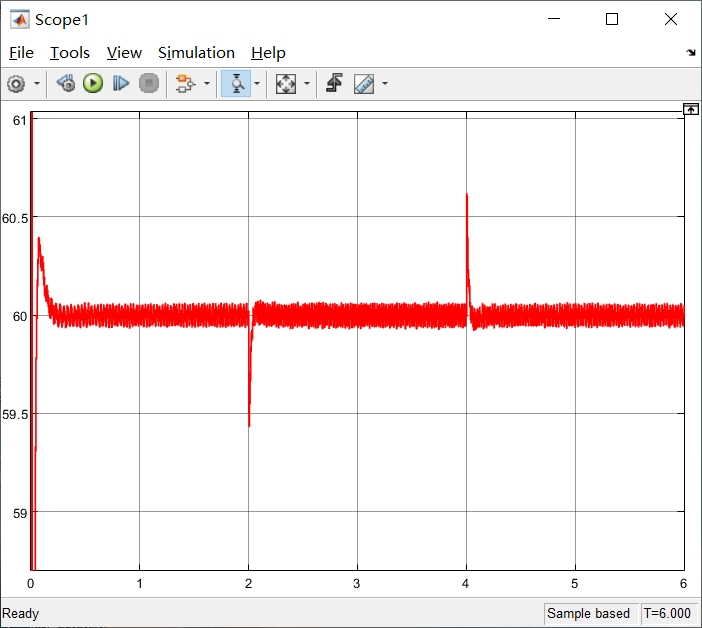
有个野路子:先把所有模块的虚拟电阻设为相同值,带载运行看电流均衡度,再微调各个参数,比纯计算推导更接地气。核心在于给每个变换器装个"虚拟电阻"——这可不是真实存在的电阻器,而是算法层面的骚操作。储能系统下垂控制,蓄电池通过双向dc/dc变换器并联负载,变换器输出电流按虚拟电阻比例分配,并补偿有下垂系数带来的母线压降。储能系统下垂控制,蓄电池通过双向dc/dc变换器并联负载,变换器输出电流按虚拟电阻
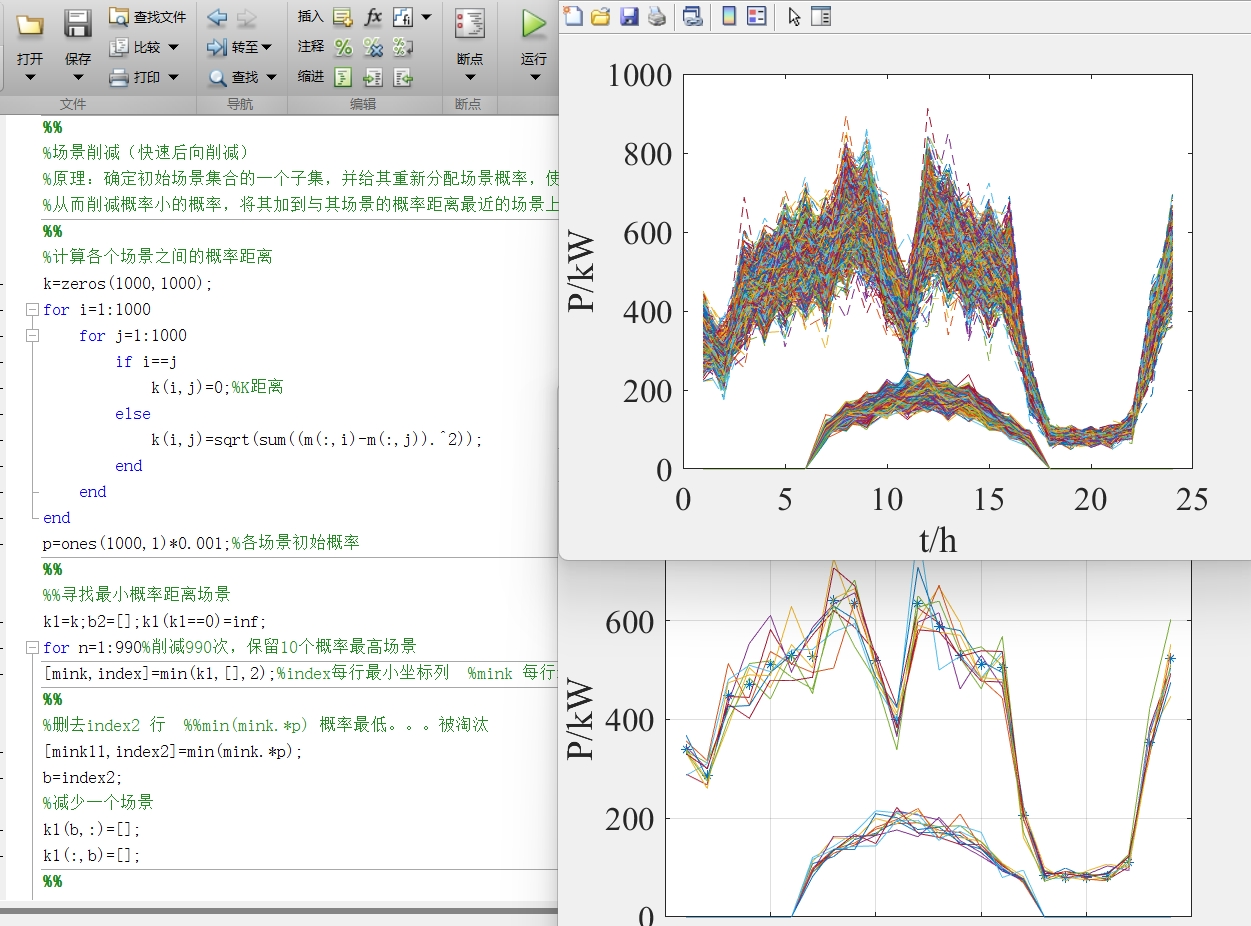
通过正态分布生成风电、光伏场景,再利用场景削减法解决大规模场景计算困难问题,整个过程逻辑清晰,代码注释也尽量做到清晰易懂,方便初学者学习。而且这种方法可移植性强,在不同的可再生能源相关项目中都能发挥作用,应用性超棒。希望大家能通过这个思路和代码示例,对基于正态分布的风光模拟场景削减有更深入的理解,也能在自己的项目中灵活运用。基于正态分布的风,光模拟的场景削减。
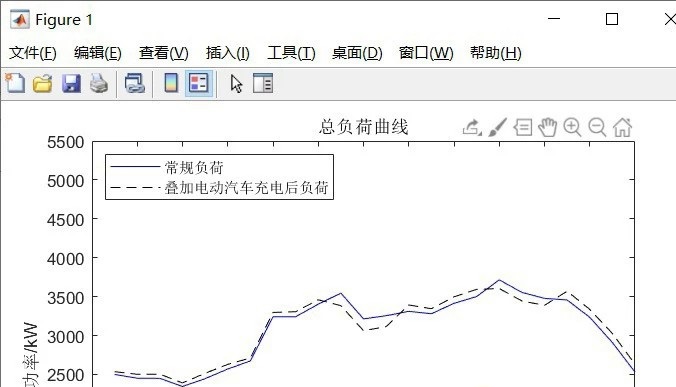
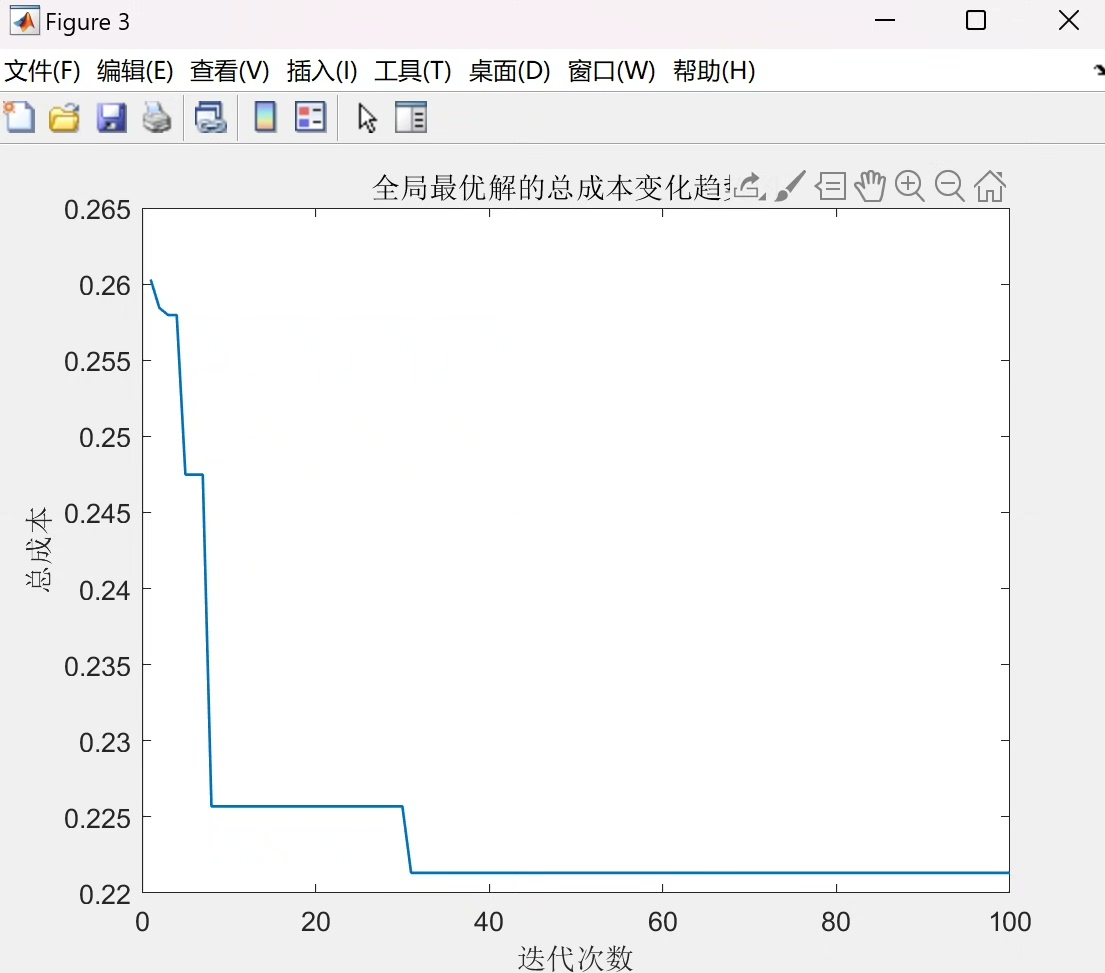
基于分时电价,采用改进粒子群算法,以最小化系统峰谷差率和用户成本最少为目标,并考虑电池寿命和充电功率等约束条件,优化电动汽车充放电。参考论文:基于V2G的电动汽车充放电优化调度策略有注释简单易懂,可自己调整参数。在如今电动汽车(EV)日益普及的时代,合理优化其充放电策略不仅能降低用户成本,还对电网的稳定运行至关重要。本文将基于分时电价,采用改进粒子群算法,以最小化系统峰谷差率和用户成本最少为目标,