




- @usstmiracle
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
原文链接:https://blog.csdn.net/qq_53961668/article/details/144240775。2. 设置 Docker 的 apt 仓库。3. 安装 Docker 包。

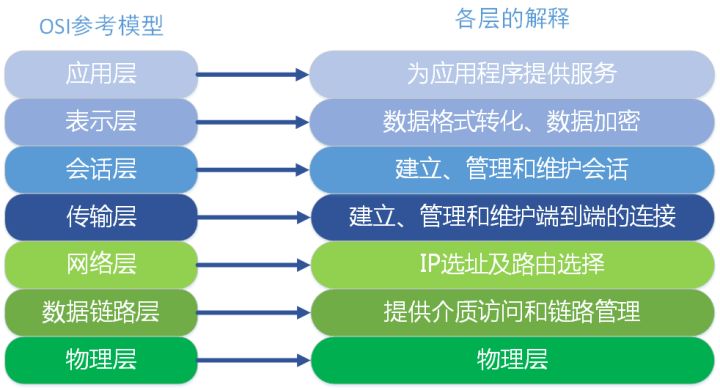
动态地址表是通过前面介绍的地址学习获得的,但动态地址表的空间有限,为节省资源,交换机采用老化机制维护地址表。本部分测试的是DUT地址学习的功能,包括ARL地址的读写、外部端口的地址学习、内部端口的地址学习、动态地址的老化时间、禁止地址学习、未知目的MAC地址的处理、静态MAC地址的确认、地址学习一次性模式、地址学习数量限制、共享VLAN地址学习、多播地址学习和未知源MAC地址的处理。数据链路层的地
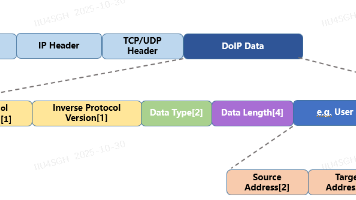
将UDS(ISO 14229)诊断服务封装到DoIP中。本例中Byte 12~14是**读数据服务(RDDBI)**的具体命令。的具体数据结构),可进一步查阅相关标准(ISO 13400-2、ISO 27145-3、ISO 14229)。ISO 13400定义了DoIP报文的基本结构,前12字节(0~11)是。,用于标识报文的类型、长度、地址等元信息。若需更深入的细节(如ISO 13400中。是助
TensorRT是用于深度学习推理的运行时库(Runtimelibrary)和优化器(Optimizer),可提供更低的延迟(Latency)和更高的吞吐量(Throughput),即通过模型量化、融合内核节点(Fusingnodesinakernel)和选择最佳数据层和算法(Bestdatalayersandalgorithms)来优化GPU内存和带宽(Memoryandbandwidth)的使

11月25日,媒体报道,特斯拉已开始向员工推出全自动驾驶(FSD)V12版本,更新版本号为 2023.38.10。很快,特斯拉CEO马斯克也在X上确认了这一消息。本月早些时候,马斯克宣布特斯拉FSD V12自动驾驶将在2周内上线试用,但市场普遍对这一时间点表示怀疑。现在看来,FSD V12版本正步入面向客户前的最后一步,或许能够在今年问世。

场景推荐当前量产项目使用 Adaptive AUTOSAR(如 RTA-VRTE 3.9.0)预研、原型、未来项目(2027+)评估和试用 S-CORE希望影响汽车软件标准加入 S-CORE 贡献需要 Rust 安全栈S-CORE 是目前最有希望的开源选择。
很多做车载、工业控制、医疗设备的人,第一次接触 QNX 时都会有一种感觉:“这不就是 Linux 吗?topsystemctl/procps因为:Linux 是“通用操作系统”思维,QNX 是“实时微内核系统”思维。这俩的世界观其实不一样。
2021中国汽车软件质量峰会”。将于2021年3月18-19日在上海召开,以“主题演讲+互动解疑+圆桌讨论”的形式,聚焦汽车软件质量开发与管理发展的需求点和痛点分析,致力于解决汽车软件市场难点,巩固未来驾驶的安全保障。点击图片查看会议详情。“全球有数不清的公司在忙着研发自动驾驶汽车,他们的产品也千奇百怪,不过基本思路和核心技术是类似的,本文详细介绍了自动驾驶汽车的硬件和软件,以及所需要做的准备工作
摘要:函数本质上是对数据的变换处理。早期人工智能采用符号主义追求精确函数,但实践中往往需要近似解,这催生了联结主义思想。当线性函数无法处理复杂数据时,通过引入激活函数实现非线性转换。通过多层嵌套和神经元连接构建神经网络,隐藏层负责特征提取,前向传播实现信号处理。网络通过调整权重和偏置参数来逼近最优解,最终目的是构建能拟合复杂关系的近似函数模型。该过程展示了从简单线性到复杂非线性函数的演变路径。(1
ISO/SAE 21434(道路车辆-网络安全工程)是车辆安全标准,定义了当攻击发生时如图所示的5个步骤。汽车制造商必须对车辆中出现的安全漏洞做出响应。但是,只有在这些漏洞已知的情况下,才能执行此操作。汽车IDS由车载IDS和后端组成。[1]IDS检测针对ECU和网络的外部攻击,将其收集后发送到汽车制造商的后端-安全运营中心(SOC)。汽车制造商对数据进行评估并决定如何应对。[1]分布式车载IDS
