




- @u013420428
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Pandas是Python的一个数据分析包。使Pandas与PyQt结合,最方便的方法就是安装qtpandas模块库。可以帮助我们把pandas的数据显示在QTableWidget上,并自动实现各种QTableWidget的功能,如增加、删除、修改、保存、排序等。
本文介绍了在Ubuntu系统上安装Claude Code的完整步骤。首先需要安装Node.js环境,推荐使用nvm管理工具安装Node.js 24版本。接着通过npm全局安装@anthropic-ai/claude-code包,并配置API密钥和模型参数。安装完成后,可在项目目录下运行claude命令启动交互界面。文章还提供了基本使用方法和命令参考,包括如何初始化项目、设置约束条件等。该教程已在U
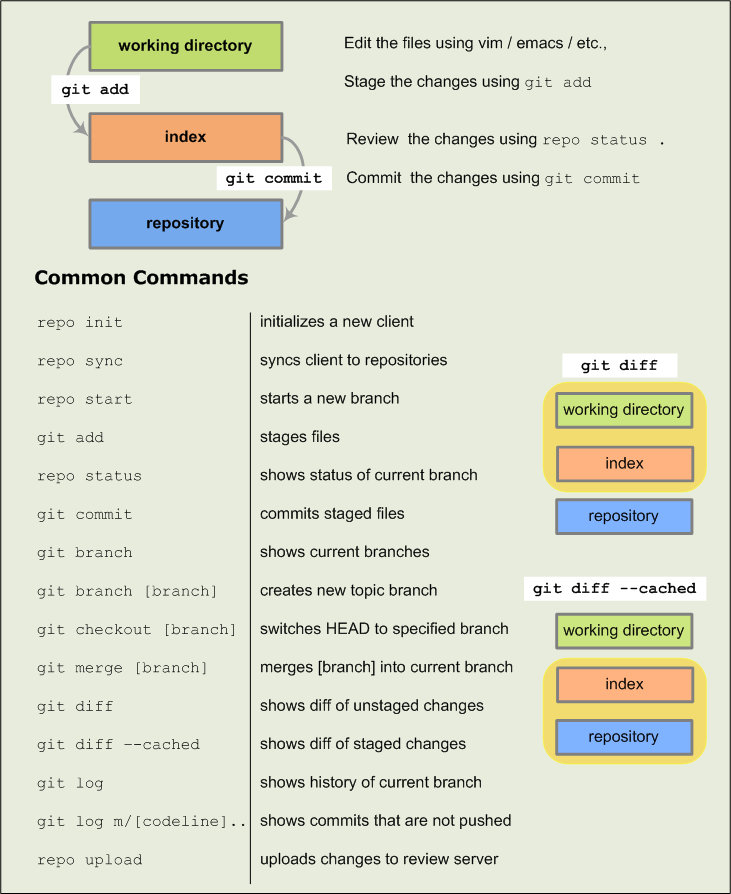
git download[https://git-scm.com/downloads]repo:repo命令参数:abandonPermanently abandon a development branchbranchView current topic branchesbranchesView curren
这些前缀用于区分本地编译器(如 x86_64 的 gcc)和目标平台的编译器。或从 Linaro、ARM 官方工具链 下载预编译版本。
Pandas是Python的一个数据分析包。使Pandas与PyQt结合,最方便的方法就是安装qtpandas模块库。可以帮助我们把pandas的数据显示在QTableWidget上,并自动实现各种QTableWidget的功能,如增加、删除、修改、保存、排序等。
AutoDL云计算搭建GPT-SoVITS-TTS语音声色克隆,语音TTS合成。

打开breed下载链接,选择有ar9331的bin文件,本例下载"breed-ar9331-wr710n_wr720n.bin" 和"breed-ar9331.bin"都可以使用。将烧录完成的Norflash焊接到板子,连接好串口(串口设置:115200,8,11N)日后兴致来了在下载openwrt源码编译个固件试试!编程器烧录breed-ar9331.bin。固件是跑起来了,但貌似不能正常工作!
当电源电压下降到该阈值以下时,BOD会触发,导致ESP32复位,以防止因电压过低而导致的损坏或不稳定运行。增加电容滤波:在ESP32的电源引脚附近增加适当的电容滤波电路,可以平滑电源电压的波动,减少BOD被触发的可能性。电源容量不足:如果电源提供的电流不足以满足ESP32及其外围设备的需求,特别是在高负载情况下,电压可能会下降。电源电压不稳定:如果ESP32的供电电压波动较大,或者电源质量较差,可
写入时间因所选操作系统文件大小和存储设备读写速度不同有所差异,一般要等一段时间。选择好树莓派设备、操作系统、存储设备点击下一步开始烧写制作启动盘。当前最新版本1.9.4:双击运行一路Next直达安装完成。选择需要的操作系统及版本。
不完全微分PID控制算法注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者!在PID控制中,微分信号的引入可改善系统的动态特性,但也容易引起高频干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可以使系统性能得到改善。克服上述缺点的方法之一是在PID算法中加入一个一阶惯性环节(低通滤波器)Gf(s)=11+TfSG_f(s