




- @u011992534
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
另外将以往使用TIVA单片机年份小车的内容一并移植到了该单片机平台中。结果当年电赛MSPM0限定的题目恰好就是小车,导致部分使用该核心板的学生成绩普遍靠前。价格和性能都占优的通用淘宝多家能买到产品,这如果被认定为“代做”或者“制造不公平”那就是属于强权打压新入局者,只允许官方认定的服务商提供解题思路方案。,在不怀好意的人煽动下网曝别人,直接禁掉一个公司的所有产品这种操作完全不符合规范,这种行为只有
很明显字面意思是后面测试完毕会统一的开源,我们并没有额外的软件有偿服务,我们使用的子模块也都是淘宝直接可以买到的,,详细地了解下具体是什么情况。解释下可能有人会有疑问的是最新的飞控代码里面有更新的关于VL53L8CX的部分驱动代码,这个我们并没有及时地去丢放到gitee开源库里面,这部分我们年前就移植进去了,因为比赛细则、传感器型号等一直在调整,学生学习的进度都不一样,有的学生无人机都还没有起飞成
无名创新飞控开源地面站——NGroundStation一、地面站开源初衷与下载链接:无名创新飞控开源飞控地面站是无名小哥为广大自研飞控开发者、电子发烧友们专门开发的一款多功能上位机软件,地面站功能涵盖:飞控状态显示、数据波形、参数调试、虚拟遥控器、飞控传感器校准串口助手常用等,开发此款地面站的初衷是方便大家高效学习与调试。初学者在学习无人机飞控相关算法选...
TIVA LaunchPad V2版本飞控代码阶段性更新日志
飞控学习常见典型问题集Q&A——无名创新

typora-root-url: img6_树莓派机载计算机通过串口指令控制无人机自主飞行教程电赛飞行器赛题的前世今生飞行器赛题至出现以来。从大体趋势上来看参赛学生的主流飞控路线主要经历了以下四个发展阶段:APM/Pixhawk开源飞控作为飞控板直接控制无人机飞行,赞助商MCU作为导航板处理部分视觉数据、测距数据后,单片机模拟出遥控信号给控制板间接控制无人机赞助商MCU作为唯一的飞控板,赞助商的M
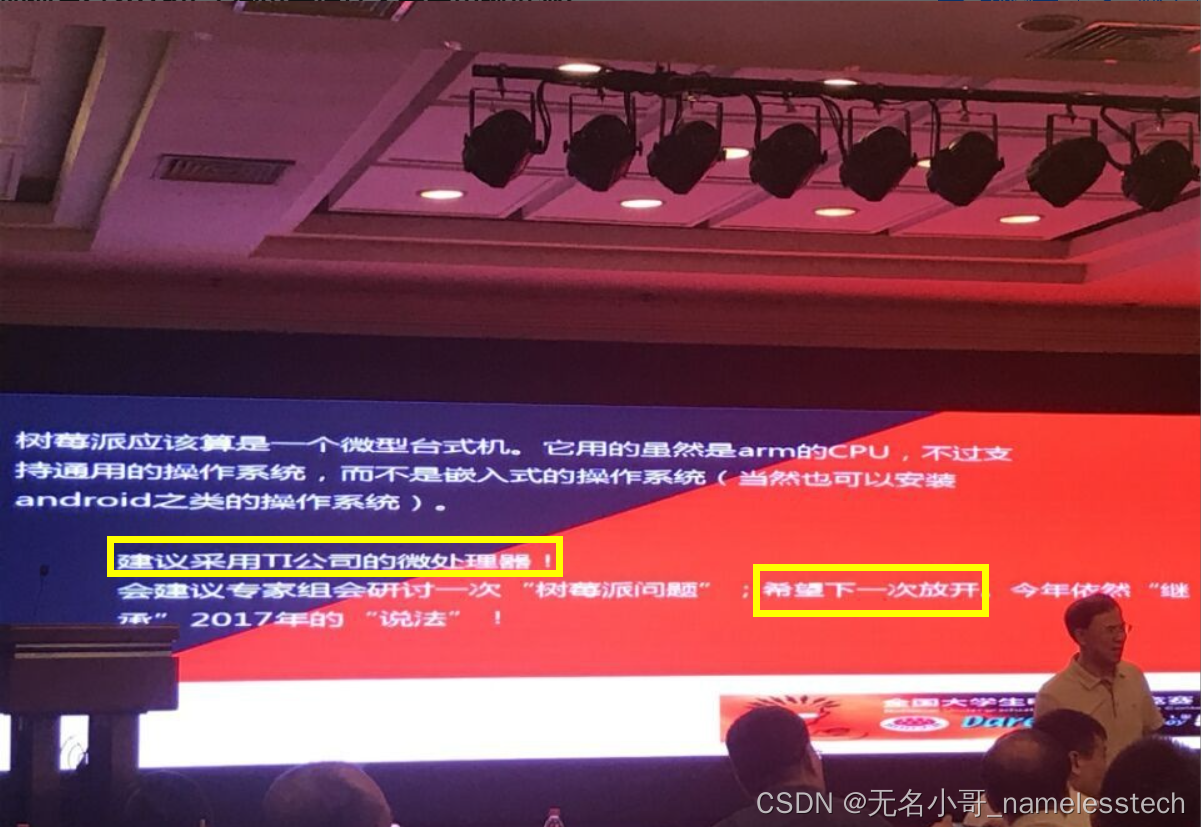
typora-root-url: img6_树莓派机载计算机通过串口指令控制无人机自主飞行教程电赛飞行器赛题的前世今生飞行器赛题至出现以来。从大体趋势上来看参赛学生的主流飞控路线主要经历了以下四个发展阶段:APM/Pixhawk开源飞控作为飞控板直接控制无人机飞行,赞助商MCU作为导航板处理部分视觉数据、测距数据后,单片机模拟出遥控信号给控制板间接控制无人机赞助商MCU作为唯一的飞控板,赞助商的M