- @together_1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
此为临时链接,仅用于预览,将在短期内失效。关闭盘点机器人四大家族——KUKA机器人特盖德智能装备特盖德机器人租赁今天德国KUKA机器人(库卡)是Johann Josef Keller和Jakob Knappich于1898年在德国巴伐利亚州的奥格斯堡(Augsburg)正式创立,是世界领先的工业机器人制造商之一。取名为“Keller und Knappich Augsburg”,简称KUKA,于1

精确零点校正不仅保证机器人程序轨迹的一致性,同时保证定位精确机器人或高精度机器人的绝对精度。定位精确机器人需要较高的零点校正精度,以保证绝对精度。机器人设定各轴的角度。各轴校零角度由变量 $MAMES[] 决定。(机器人系统自动完成)图说:根据零点探头及标记槽的位置不同,不同型号机器人的角度不尽相同。记录校零当前电机角度。(机器人系统自动完成)电机角度值将被存储到后台文件中,例如“653631.c

工业机器人作为先进制造业中不可替代的重要装备和手段,已成为衡量一个国家制造业水平和科技水平的重要标志。目前我国正处于加快转型升级的重要时期,以工业机器人为主体的机器人产业,正是破解我国产业成本上升、环境制约问题的重要路径选择。中国工业机器人市场近年来持续表现强劲,市场容量不断扩大。工业机器人的热潮带动机器人产业园的新建。到目前为止,上海、徐州、常州、昆山、哈尔滨、天津、重庆、唐山和青岛等地均已经着
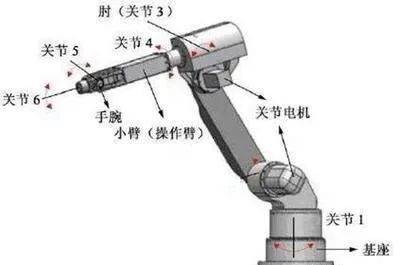
工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。六轴工业机器人是在实际生产中常用的6关节工业机器人,六轴机械手臂、六关节机械手、六轴机械臂、机器手臂等等都是它的称呼,工业机器人一般是指四轴、五轴、

1、Robot MasterRobotmaster来自加拿大,由上海傲卡自动化公司代理,是目前全球离线编程软件中顶尖的软件,几乎支持市场上绝大多数机器人品牌(KUKA,ABB,Fanuc,史陶比尔、柯马机器人、三菱、DENSO电装机器人、松下机器人……),Robotmaster在Mastercam中无缝集成了机器人编程、仿真和代码生成功能,提高了机器人编程速度。2、RobotArtRobotArt

工业机器人值得关注的7大技术参数: 1.自由度 自 由度可以用机器人的轴数进行解释,机器人的轴数越多,自由度就越多,机械结构运动的灵活性就越大,通用性强。但是自由度增多,使得机械臂结构变得复杂,会降低机器人的刚性。当机械臂上自由度多于完成工作所需要的自由度时,多余的自由度就可以为机器人提供一定的避障能力。目前大部分机器人都具有3~6个自由度,可以根据实际工作的复杂程度和障碍进行选择。 2.驱
KUKA机器人系统通常由机械部分,控制系统,人机操作界面组成。机器人本体通常有:四轴机器人、六轴机器人两种机械本体。控制系统:控制器、控制电机的伺服、用于外部的IO端子组成,集成在控制柜中,如图2所示。人机操作界面主要就是示教器,如图3所示。图1图2...

机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。1、类型机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。2、结构形
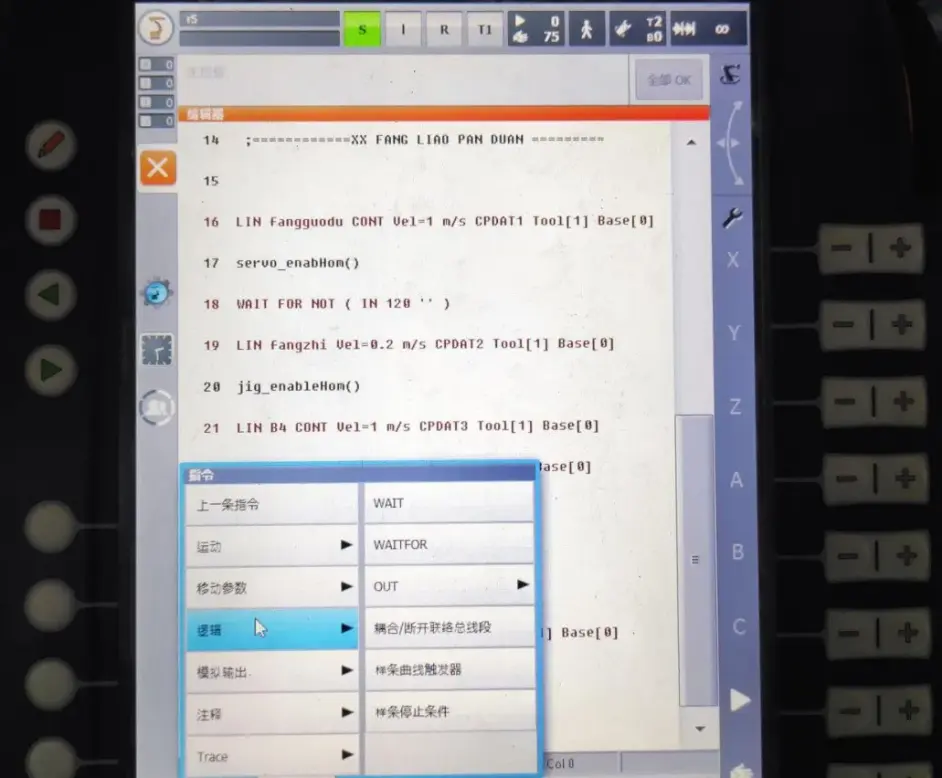
库卡机器人的逻辑指令1、在示教器T1模式下进入程序,左下角点击:指令—逻辑,会看到最常用的WAIT 等待、WAITFOR 等待、OUT 输出等逻辑指令。2、如图下所示:选择WAIT 。界面最下端出现WAIT Time 口 sec .这个WAIT 是等待时间时使用的,口 输入1 代表等待1秒输入2 代表等待2秒.......3、如图下所示:选择WAITFOR (这个WAITFOR是等待某信号时使用的
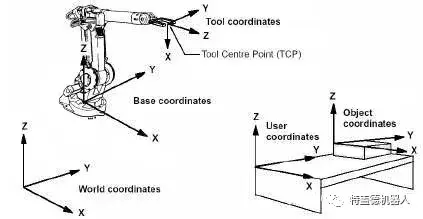
每个坐标系都有各自的作用, 很多函数指令都要用坐标系, 比如offs要用到工件坐标系,reltool要用到工具坐标系。大地坐标,工件坐标,基坐标。多种坐标。每种坐标意义不一样,但是都是为了记录机器人的相对位置。”建立自己的工具坐标系有两个好处:1.方便我们在做机器人重定位旋转时,可以很方便的让机器人绕着我们定义的点做空间旋转,从而很方便的把机器人调整到我们需要的姿态。2.更换工具时,只要按照第一个