




- @skhoole
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
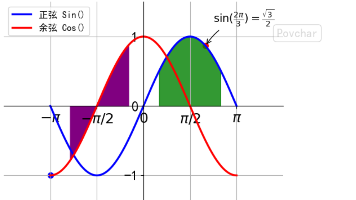
1.绘制函数:y=sin(x),y=cos(x),x=np.linspace(-np.pi,np.pi,256,endpoint=Ture)声明:文章仅供学习使用。商业转载请联系作者获得授权,非商业转载请注明出处。绿色区域:np.abs(x)<0.5,sin(x)>0.5。紫色区域:(-2.5<x)&(x<0.5)紫色的设置:color=‘purple’1.根据如下绘制写出相应的代码。
本文记录了基于Isaac Sim 5.1和RTX 4090的具身机器人开发环境配置过程。主要步骤包括:通过pip和conda安装相关依赖包,克隆GitHub项目仓库,配置CUDA 12.1兼容的PyTorch 2.4.0环境,编译安装lietorch等第三方库。开发过程中遇到的主要问题包括:CUDA版本不匹配、模型文件下载失败、路径配置错误等。虽然最终未能完全复现春晚舞蹈机器人项目,但提供了完整的
本文摘要:教程指导如何配置Obsidian作为MCPServer,实现AI助手直接操作本地笔记。关键步骤包括:1)安装Node.js环境(推荐使用nvm管理);2)为Obsidian安装MCP协议插件;3)在CherryStudio中配置stdio连接(需指定Obsidian库绝对路径)。配置成功后,AI可通过read_notes等工具访问本地笔记内容。教程还提供了错误排查方法,并指出Cherry
摘要:本文记录了MCP工具的三种实验过程:1)云端Hosted模式配置,需从ModelScope平台获取fetch工具配置;2)本地Local模式部署,直接运行mcp-server-fetch服务;3)多工具协作实验,结合fetch和filesystem工具实现网页抓取与Obsidian笔记自动写入。实验过程中遇到教程指引不明确、404错误等问题,通过手动探索解决。关键步骤包括JSON配置导入、路
摘要:本文介绍了深度学习中的关键概念。前馈(Feedforward)指神经网络中信息单向传递的过程;感知器(Perceptron)是最简单的神经网络单元;卷积(Convolutional)操作用于提取局部特征。编码器(Encoder)实现数据压缩表示,正则化(Regularization)防止模型过拟合(Overfitting,即模型过度适应训练数据)。欠拟合(Underfitting)则指模型未
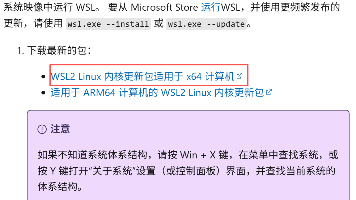
本文详细介绍了在Windows系统上配置WSL2和Docker环境的完整流程。主要内容包括:1)通过PowerShell启用WSL2并设置默认版本;2)从Microsoft Store安装Ubuntu系统并初始化;3)在Linux终端更新包管理器并安装必要工具;4)配置Docker镜像加速器;5)解决Docker空间不足和端口占用问题,最终成功启动服务。文章提供了完整的命令行操作步骤和常见问题解决
本文记录了基于Isaac Sim 5.1和RTX 4090的具身机器人开发环境配置过程。主要步骤包括:通过pip和conda安装相关依赖包,克隆GitHub项目仓库,配置CUDA 12.1兼容的PyTorch 2.4.0环境,编译安装lietorch等第三方库。开发过程中遇到的主要问题包括:CUDA版本不匹配、模型文件下载失败、路径配置错误等。虽然最终未能完全复现春晚舞蹈机器人项目,但提供了完整的
摘要:WorkBuddy拥有较高权限,可直接操作C盘文件并解释执行内容;而QClaw权限较低,仅提供命令代码且不解释内容,在尝试保存文件到C盘时会因权限不足报错。两者主要区别在于系统权限级别和对用户操作的反馈方式。
本文详细介绍了在Windows系统上配置WSL2和Docker环境的完整流程。主要内容包括:1)通过PowerShell启用WSL2并设置默认版本;2)从Microsoft Store安装Ubuntu系统并初始化;3)在Linux终端更新包管理器并安装必要工具;4)配置Docker镜像加速器;5)解决Docker空间不足和端口占用问题,最终成功启动服务。文章提供了完整的命令行操作步骤和常见问题解决
摘要:本文记录了MCP工具的三种实验过程:1)云端Hosted模式配置,需从ModelScope平台获取fetch工具配置;2)本地Local模式部署,直接运行mcp-server-fetch服务;3)多工具协作实验,结合fetch和filesystem工具实现网页抓取与Obsidian笔记自动写入。实验过程中遇到教程指引不明确、404错误等问题,通过手动探索解决。关键步骤包括JSON配置导入、路