




- @shouchen1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【代码】stm32和python串口数据收发。

1. 关节驱动器双足机器人的关节驱动通常采用大扭力数字舵机,这是因为数字舵机控制精度更高,且在机器人行走时,机器人双腿交替作为支撑腿,此时所用的重量都需要支撑腿承受,如果机器人舵机的扭力不足,则会出现机器人行走时由于动力不足导致机器人剧烈抖动,发生倾倒甚至损坏舵机。舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机主要有控制电路、驱动马达、减速器(齿轮)与位置
Webots 2021a安装包,链接如下:链接:https://pan.baidu.com/s/1Ue-0AfDVHvsbbFvZ1KDjwA提取码:5225webots R2021a 官方教程中文翻译(一)你在webots的第一次仿真(二)修改环境(三)外观(四)有关控制器的更多内容(五)复合刚体和物理属性(六)四轮机器人(七)你的第一个原型(八)使用ROSwebots超详细教学视频传送门,走你
URDF创建1、URDF基本语法URDF 文件是一个标准的 XML 文件,XML文件定义了一系列的标签用于描述机器人模型,机器人模型可能较为复杂,但URDF 中机器人的组成却是较为简单,可以主要简化为两部分:连杆(link标签) 与关节(joint标签),接下来我们就通过案例了解一下 URDF 中的不同标签:1.1 robot 根标签urdf 中为了保证 xml 语法的完整性,使用了robot
从TensorBoard中导出数据并对其进行平滑处理
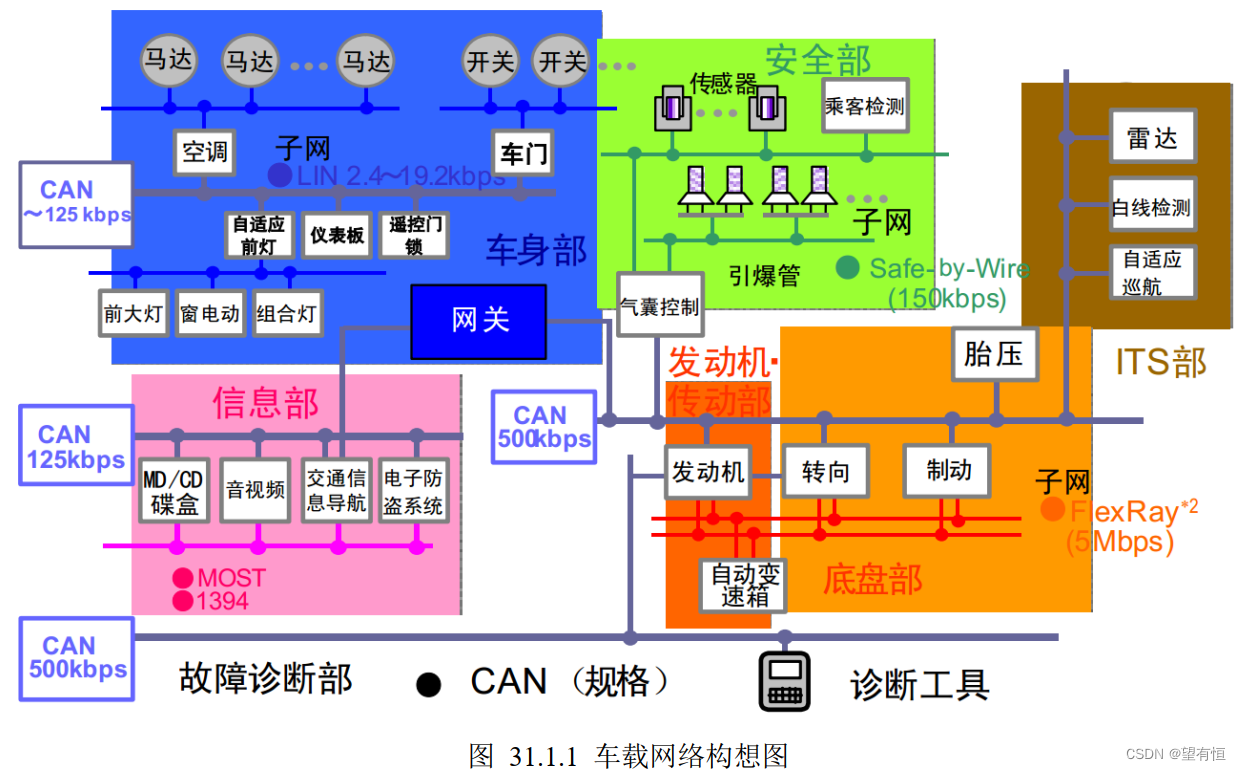
CAN基础知识
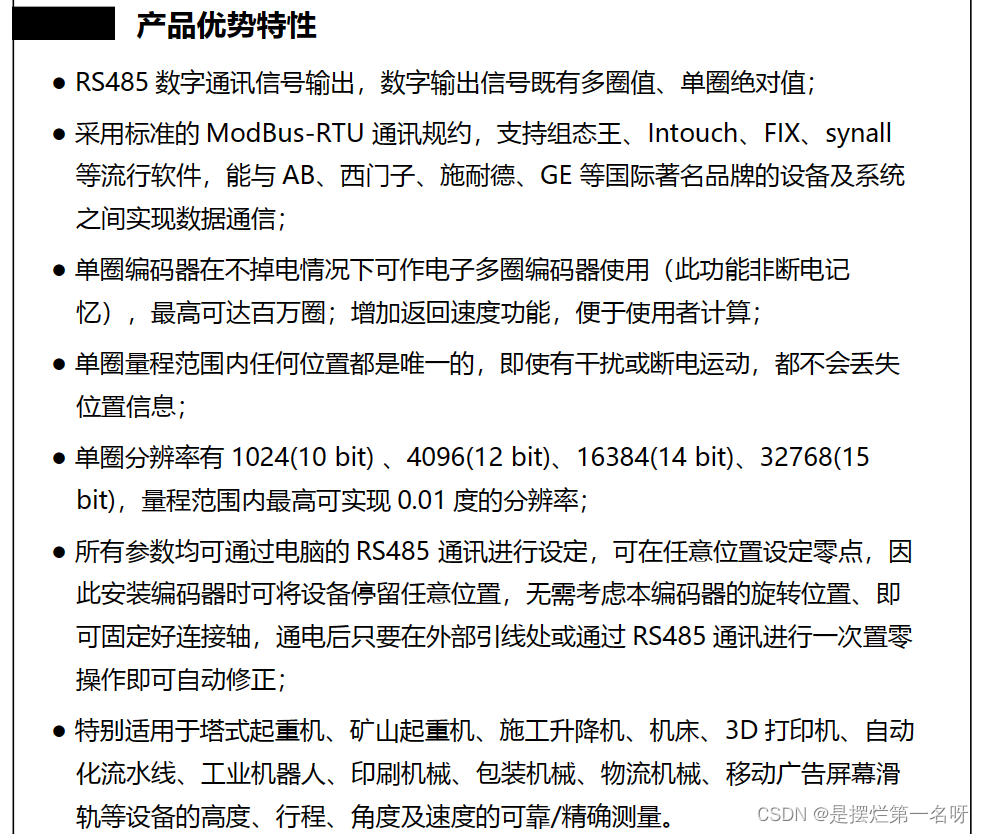
如上表可知,该编码器共有13个寄存器,每个寄存器对应着一种功能,可通过对这13个寄存器进行设置,实现特定的功能。由1.2可知,寄存器有两种模式:读和写。支持功能码为0x03为读保持寄存器,支持功能码为0x06为写保持寄存器。
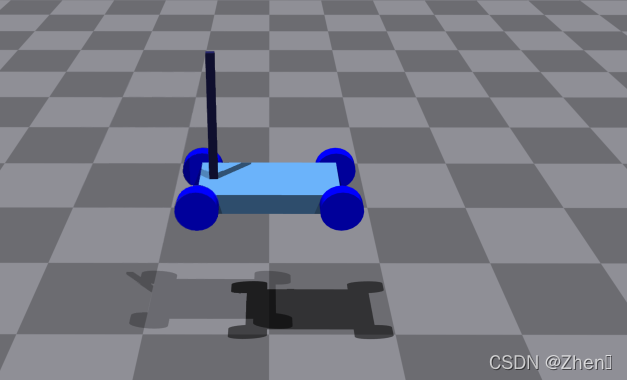
MuJoCo 是一个物理引擎,用于使用contacts进行详细、高效的刚体模拟。允许使用 Python 3 中的 MuJoCo。该库已更新为与 2021 年 10 月 18 日发布的 MuJoCo 2.1 版兼容。目前支持以下平台:以下平台已弃用且不受支持:If you want to specify a nonstandard location for the package,use the e
pc下载apk文件到andriod开发板,并实现可视化
通过PC给Android开发板安装软件并可视化方法