




- @scott198510
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
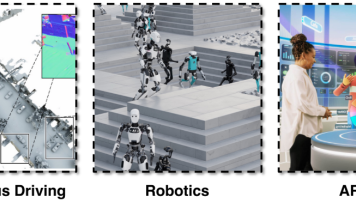
3DGS渲染加速,适应边缘端 3D 交互,包括AR/VR 设备的实时场景渲染、移动机器人的环境感知可视化
3DGS渲染加速,适应边缘端 3D 交互,包括AR/VR 设备的实时场景渲染、移动机器人的环境感知可视化
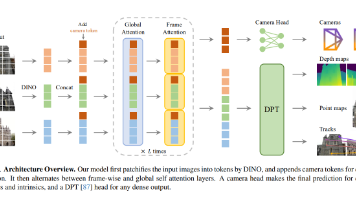
VGGT 的核心贡献在于打破了 “3D 重建依赖几何优化” 的传统范式,通过大模型 + 多任务联合训练,实现了 “快速、通用、高精度” 的 3D 属性推断。效率突破:秒级处理数百张图像,为实时 3D 重建(如自动驾驶、AR/VR)提供可能;易用性提升:无需手动设计多阶段流水线(如 SfM 的特征匹配→三角化→BA),直接端到端输出所有 3D 属性;生态赋能:预训练骨干可迁移至多种下游任务,为 3D
点云数据配准、目标识别、检测、自动驾驶、高精地图
COCO数据集说明与mAP评价体系

点云数据配准、目标识别、检测、自动驾驶、高精地图
0. 摘要为了满足无人驾驶车辆高精度导航地图制作和道路重建扩建工程等各种应用的需求,提出了一种有效的从移动激光扫描(MLS)点云中进行道路标线的自动化提取、分类和矢量化的方法。首先,将移动激光扫描点云划分为地面点和非地面点。其次,在图像处理方案下,生成多个地理参考图像,并进一步用于检测道路标线像素。第三,从图像中检索道路标线点云,并进一步分割为连接的对象。采用OSTU大津法阈值分割和统计离群值去除
汽车电子主要专业名称汇总
python -pcl模块与函数说明
0. 摘要为了满足无人驾驶车辆高精度导航地图制作和道路重建扩建工程等各种应用的需求,提出了一种有效的从移动激光扫描(MLS)点云中进行道路标线的自动化提取、分类和矢量化的方法。首先,将移动激光扫描点云划分为地面点和非地面点。其次,在图像处理方案下,生成多个地理参考图像,并进一步用于检测道路标线像素。第三,从图像中检索道路标线点云,并进一步分割为连接的对象。采用OSTU大津法阈值分割和统计离群值去除