- @qq_58982825
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
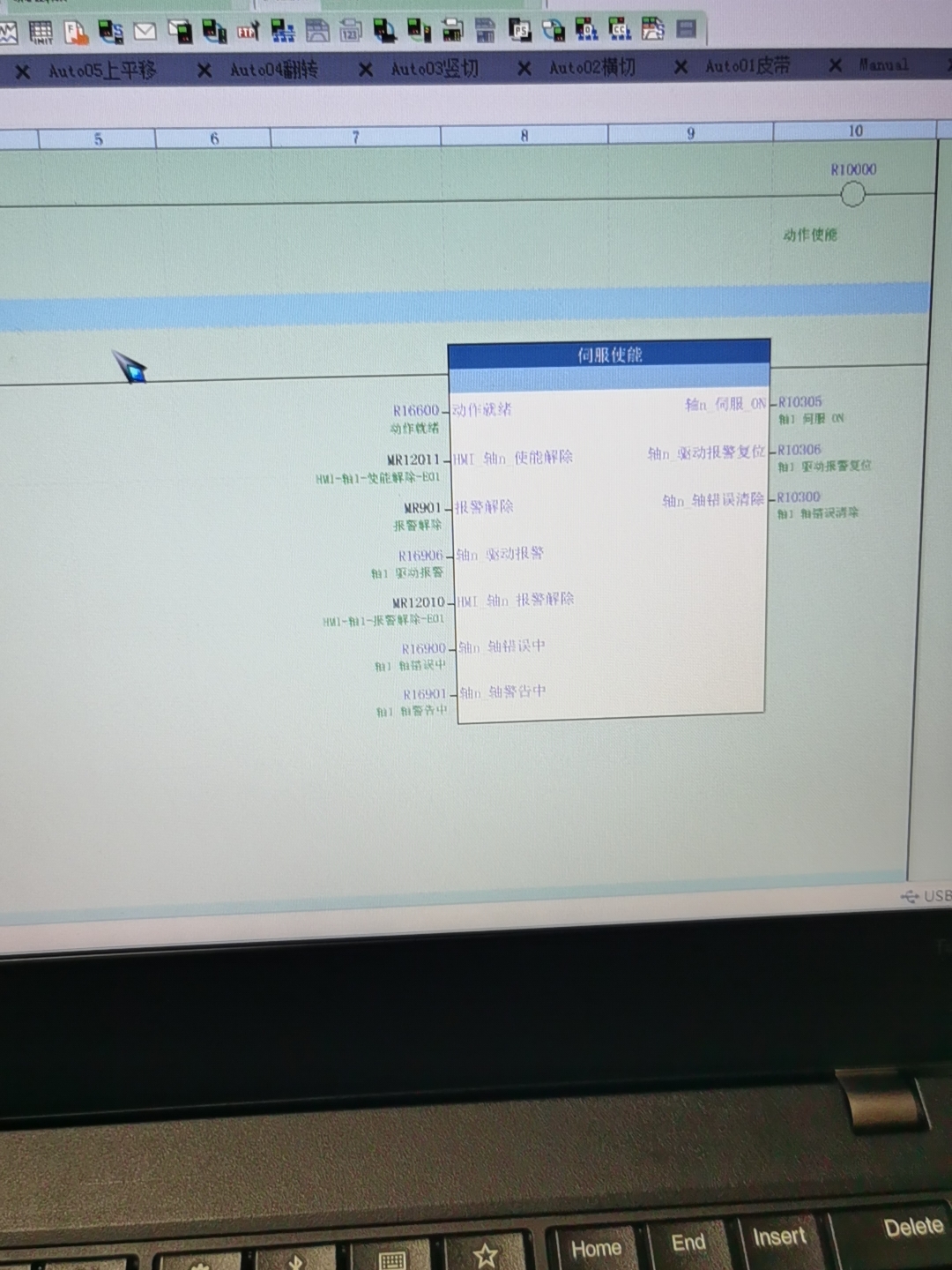
基恩士KV系列的工业控制器开发,尤其是XH16EC总线通讯,总能让人在底层协议和框架设计之间反复横跳。最近重构的这套总线控制框架,核心逻辑其实就一句话:用有限状态机驱动设备通讯,用结构体封装工艺参数。实测发现基恩士的底层运动指令在急停时会有位置震荡,通过功能块内部的PID修正后,定位精度从±0.1mm提升到±0.02mm。基恩士PLC KV-7500/KV8000+XH16EC总线控制,本人自己开
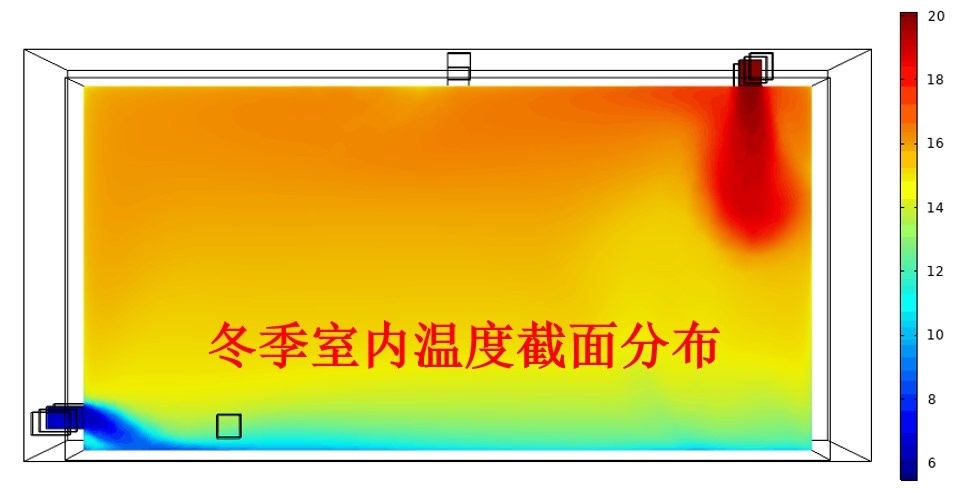
仿真这玩意儿,本质上是用数学暴力破解物理规律。COMSOL结果再漂亮,也得拿着红外测温仪去现场校准。上次有个仿真显示西晒墙温度差3℃,实测发现是玻璃幕墙的镀膜参数填错了... 所以啊,代码能仿真相,但仿不了人心。
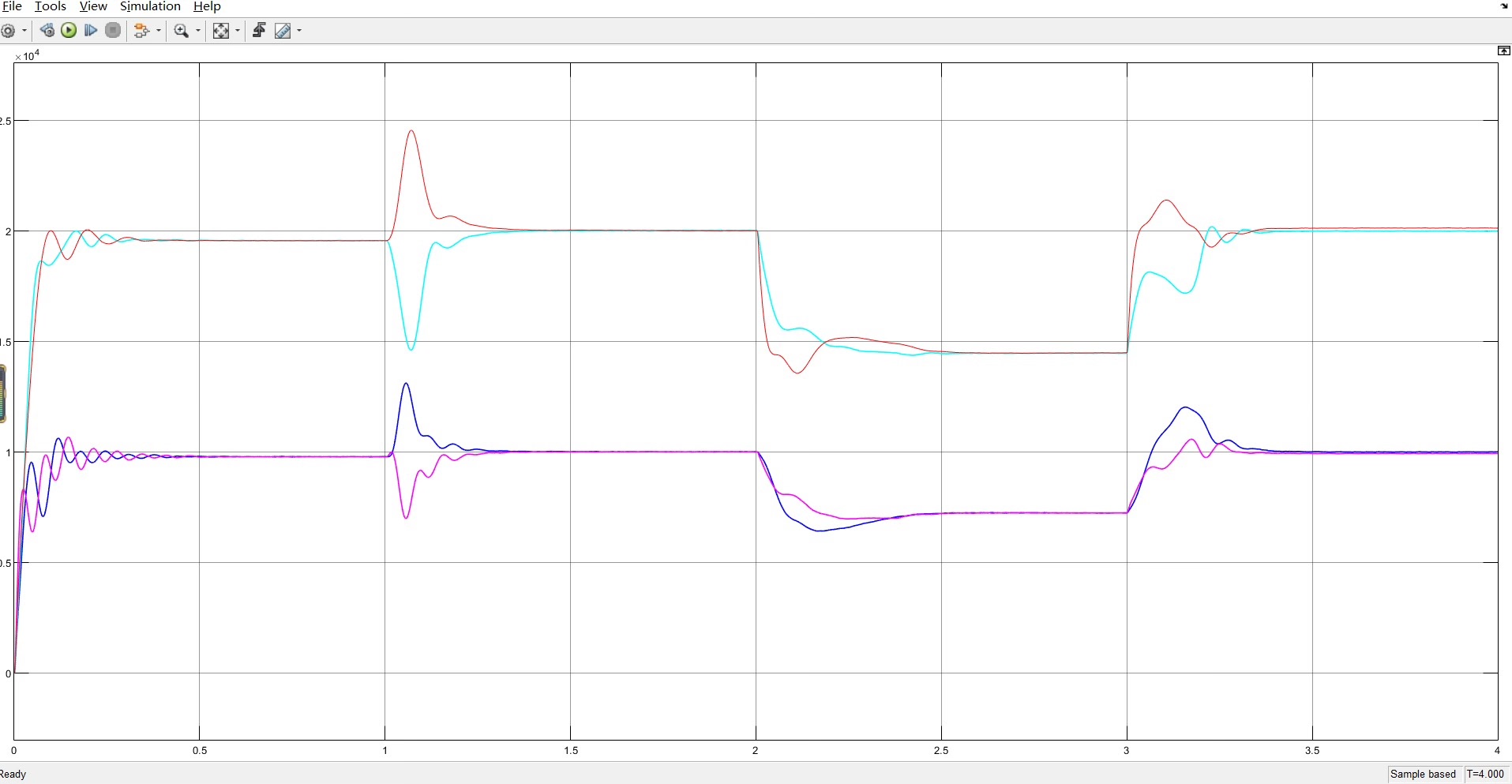
机械臂的阻抗控制就像是让机器人学会"以柔克刚"的太极功夫。想象一下机械臂在装配作业中突然碰到障碍物,僵硬的位置控制可能直接撞坏零件,而具备阻抗特性的机械臂却能像人类肌肉一样产生柔顺响应。而加了阻抗控制后,最大力矩控制在3N·m以内,接触力曲线也平缓得像抹了黄油。这里有个精妙的设计:通过M*inv(Md)将实际惯性向虚拟惯性对齐,相当于给机器人本体特性套了个"滤镜"。Bd和Kd参数就像调节机器人"肌
创新,LD,孤岛微电网二次控制,下垂控制,动态事件触发,实现了二次控制,达成了有功功率均分,处理异步通信一致性问题,效果好,有对应参考文献。在微电网领域,如何实现高效稳定的运行一直是研究的热门话题。今天咱就来聊聊孤岛微电网二次控制里那些有趣又创新的玩法,特别是和下垂控制、动态事件触发相关的内容。
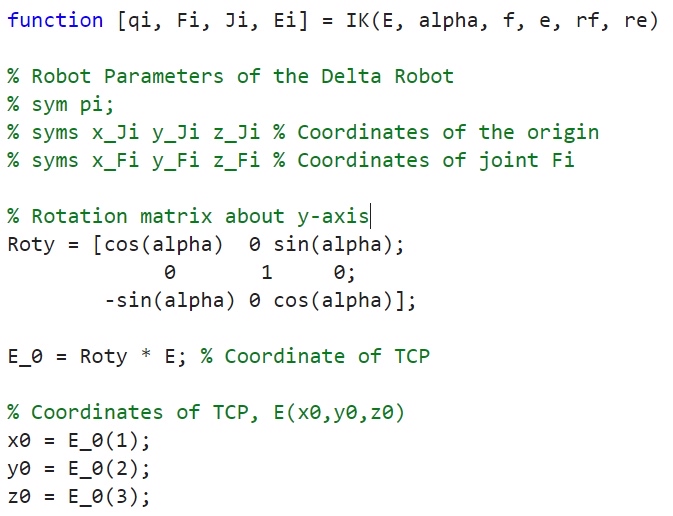
sphere_intersection函数用三个球面求交,这里有个坑——实际会有两个数学解,需要根据机械约束排除不合理的位置。调试时遇到的诡异bug:有一次逆解计算的角度明明在限位范围内,但正解返回的位置差了几十毫米。跑出来的点云像个倒置的碗,顶部有平台区。有意思的是当采样间隔从5度改成2度时,会发现工作空间边缘有锯齿状结构——这说明delta的运动存在非线性突变区。先来点干货,delta的正运动
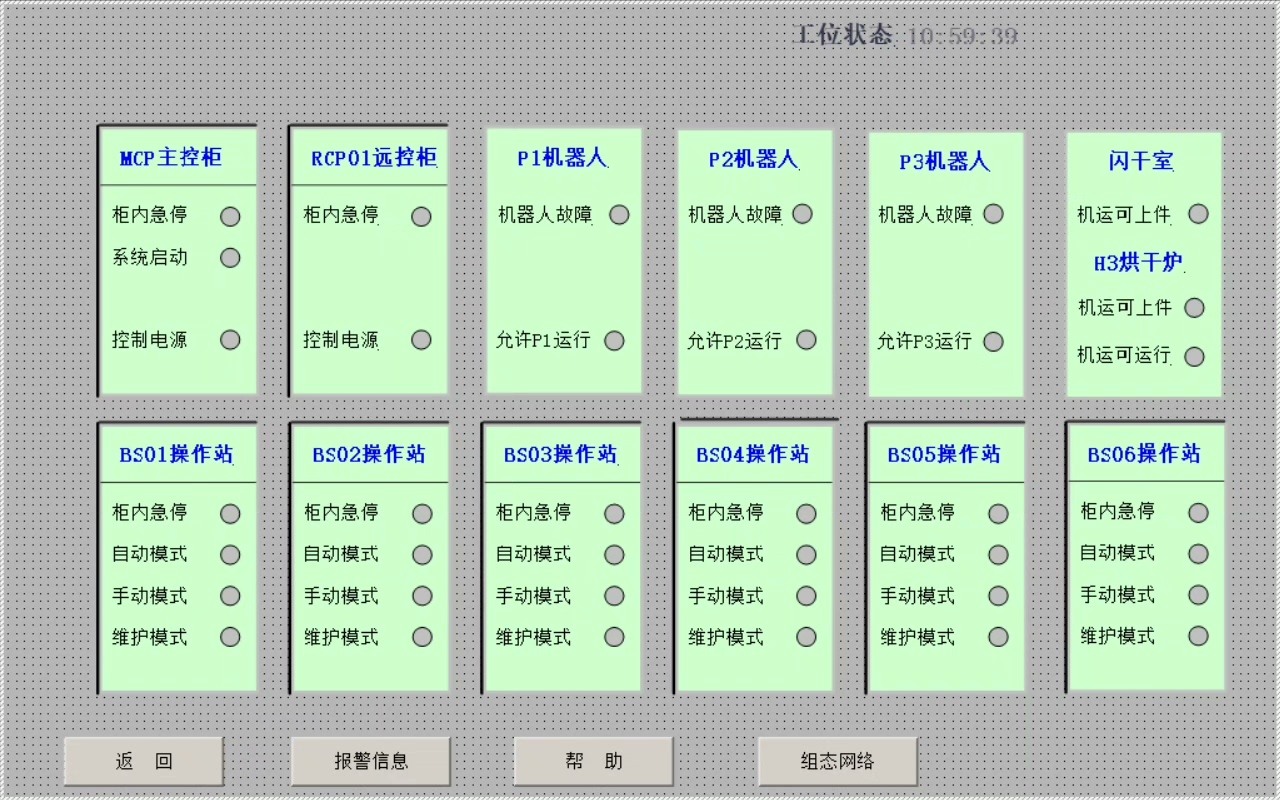
(代码示例基于TIA Portal V15环境,实际项目中的FC/FB模块名称已做脱敏处理)这套程序像本活字典,从网络拓扑到设备互联,处处都是可以拆解复用的零件库。特别是那24台G120的Profinet参数组态,直接暴露了西门子驱动器的调试密码——原来同步模式要设P2048参数为3才能让喷涂机走直线轨迹。整个项目最值钱的是DB600数据块,里面存着喷涂机器人的轨迹参数。QB128对应的输出模块上
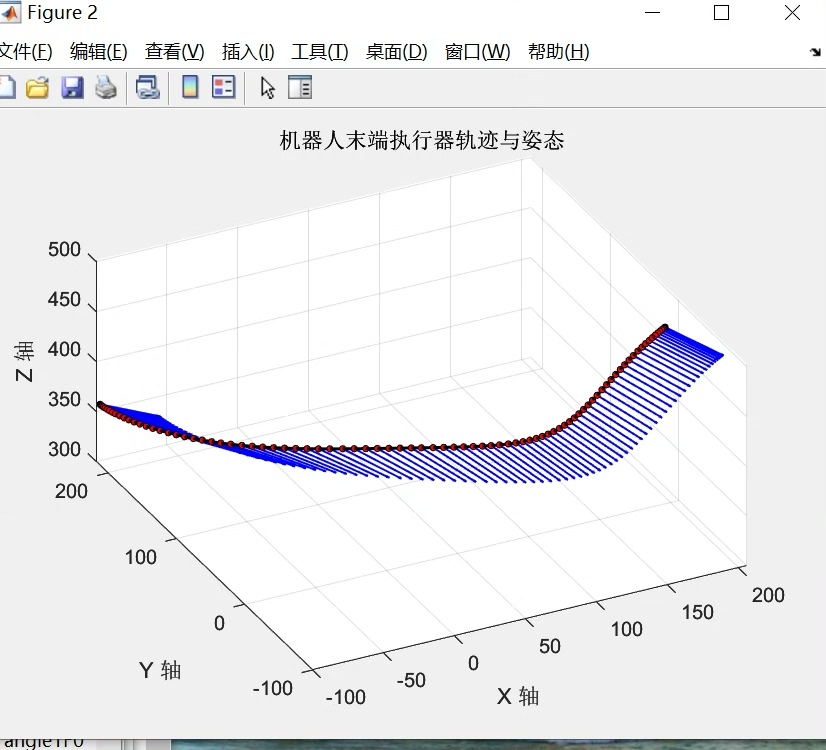
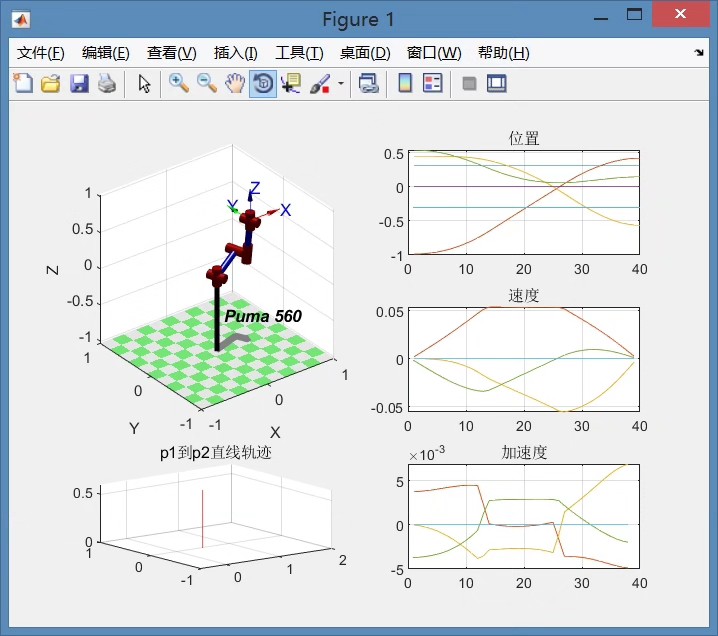
两种轨迹对比下,直线适合焊接、喷涂等场景,圆弧则在绕障碍作业时更实用。不过要注意PUMA560的工作空间限制,别让逆解计算时频繁报错。运行后会看到蓝色圆弧轨迹。如果出现关节突变,可以试试在轨迹点之间插入过渡点,或者改用五次多项式插值。生成的gif动图直接贴报告里,比干巴巴的曲线图直观多了。轨迹规划的核心就是这些,剩下的参数调整得根据实际负载来微调了。直线轨迹的实现最省事,工具箱自带的jtraj能自
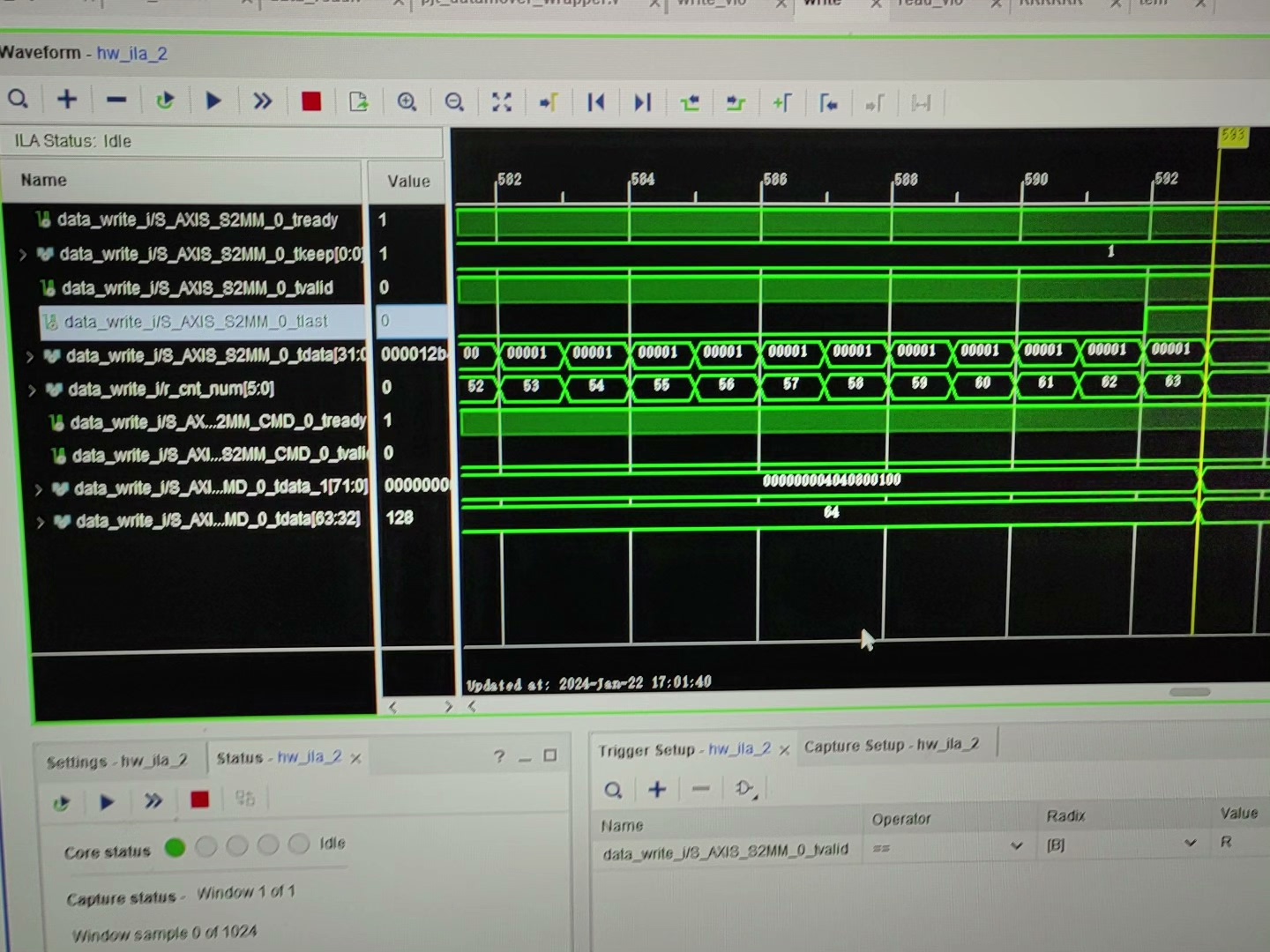
最后扔个性能数据:256位总线宽度下,实测写吞吐跑到3800MB/s,读性能略低因为得等DDR的CL周期。想要完整工程的哥们,Git仓库已打包好Vivado 2022.1工程,直接生成bitstream就能开搞。datamover实现ddr数据读写操作,读写控制部分用verilog编写,AXI总线,其余连线部分全部在BLOCK design里,内置ila及vio控制信号,简单明了,可提供技术,完整
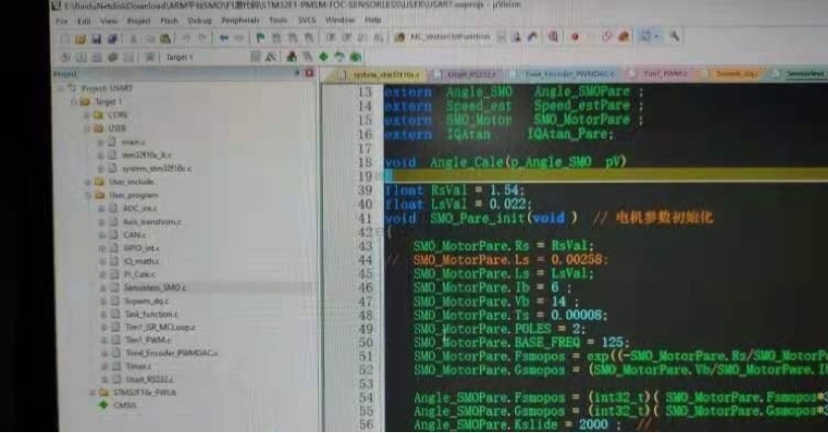
控制策略:FOC(磁场定向控制)作为一种高性能的电机控制技术,能实现对交流电机的精确控制。这里结合了滑膜观测器来实现无传感器控制,避免了安装传感器带来的成本增加与可靠性问题。启动采用Vf控制,简单高效,让电机能平稳起步,之后再切换到FOC控制实现高精度运行。SVPWM控制:SVPWM(空间矢量脉宽调制)是生成逆变器驱动信号的关键方法。它通过合成空间电压矢量,相比传统的SPWM能更有效地利用直流母线
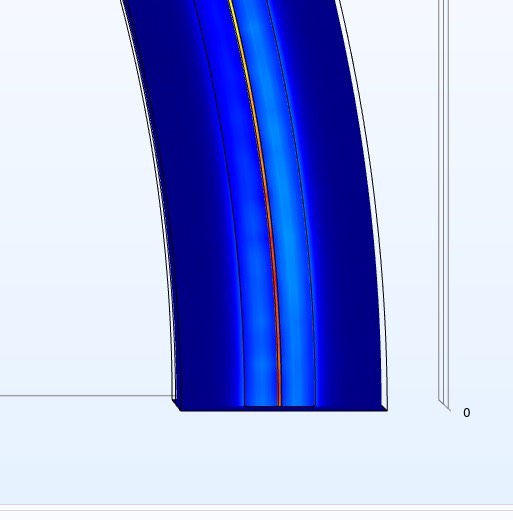
这玩意儿就像给光设计过山车轨道,既要保证信号不翻车,还得算准损耗值。今天咱们用接地气的方式拆解流程,顺便聊聊那些藏在参数背后的"骚操作"。这段代码画了个半径50μm的90度圆弧,重点在rot参数的骚操作——用theta控制弯曲角度,比GUI里拖拽滑块精准十倍。新手常栽在单位不统一上,记得COMSOL默认是米制,微米得加e-6。批量跑完不同曲率的数据,导出到MATLAB做个三维曲面图,分分钟就能找到