




- @qq_55679637
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
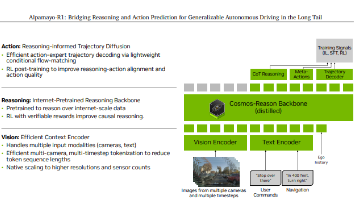
NVIDIA开源了面向自动驾驶的Vision-Language-Action(VLA)模型Alpamayo,该模型整合了视觉理解、推理和动作预测功能,能提供决策过程的因果推理链。尽管因硬件限制(需24GB显存)未能完整运行,但通过代码分析发现其设计理念值得机器人领域借鉴。相比传统模块化机器人系统,VLA的统一框架让机器人具备更强的环境理解和自主决策能力,可应用于家庭服务、商超等场景。虽然当前硬件门
本文针对机器人开发中常见的双网卡配置问题,详细介绍了在Ubuntu系统下使用NetworkManager(nmcli)为WiFi配置静态IP的方法,同时保持有线网络连接机器人下位机的稳定性。文章首先分析了典型网络拓扑需求,指出配置过程中常见的三大误区:网卡命名规则变化(如wlo1替代wlan0)、DHCP自动分配IP冲突以及/23子网掩码的实际含义。通过具体案例演示了查看网络状态、连接WiFi、设

摘要:STM32CubeIDE支持通过安装Babel语言包切换为简体中文界面。操作步骤:1)在Help菜单选择Install New Software;2)添加Eclipse Babel更新站点;3)选择简体中文语言包安装;4)重启软件即可生效。若未切换成功,需检查语言包安装状态或在Preferences中确认语言设置。注意确保网络稳定,若链接失效可从Eclipse官网获取最新地址。该功能可提升中
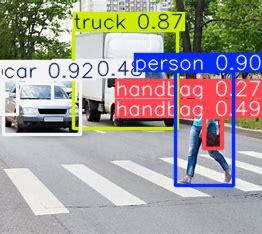
简单安装yolov11
本文以节卡ZU12六轴机械臂为例,探讨了工业机器人驱动系统的架构设计。文章从实际使用体验出发,分析了拖拽式编程的局限性,提出采用代码方式理解机械臂控制。核心架构采用四层解耦设计:状态管理层、运动学层、动力学层和安全层,通过组合方式实现模块化。重点解析了状态机设计的安全机制、运动学与动力学的分离原则、安全模块的独立化实现,以及通信层的抽象扩展性。文章还提供了工程实践建议,包括状态持久化、安全监控增强

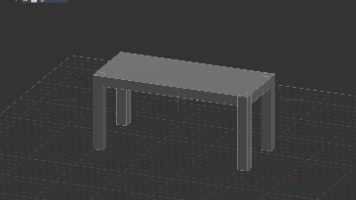
本文介绍了在Webots仿真软件中导入自定义3D模型的方法。作者使用Fusion 360设计了一个1600×700×750mm的工作台模型,导出为STL格式后导入Webots。由于尺寸问题,作者通过两次缩放(先缩小100倍,再缩小1000倍)才使模型大小合适,并为其添加了材质颜色。文章简要说明了Webots在硬件仿真中的优势,包括无需实际组装维修等优点,同时指出软件功能复杂带来的使用挑战。最后展示
相机检测 :自动列出可用的相机设备及其基本信息参数管理 :获取和设置相机的各项参数(分辨率、帧率、亮度等)实时显示 :实时显示相机捕获的视频流视频录制 :支持手动和自动两种录制模式帧捕获 :支持随时保存当前帧为图片程序采用模块化设计,各功能模块清晰分离,便于维护和扩展。整体结构如下:list_available_cameras() :检测和列出可用相机set_camera_parameters()
摘要:本文介绍使用LazyLLM框架快速部署大语言模型服务的完整流程。主要内容包括:1)搭建Python3.10+虚拟环境并安装LazyLLM;2)通过Flask实现兼容OpenAIAPI的服务端;3)使用Docker容器化部署NVIDIATensorRT-LLM镜像;4)提供PowerShell测试脚本验证API接口。文章还总结了常见问题解决方案,如网络连接、端口配置和模型加载错误处理。该方案为
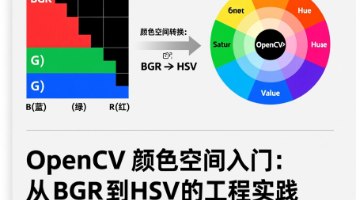
本文系统介绍了OpenCV中颜色空间转换的工程实践方法。主要内容包括:1)OpenCV默认使用BGR顺序的原因及与RGB的转换;2)通过构建标准颜色示例图像理解不同颜色空间特性;3)重点讲解BGR转灰度、HSV等常用转换方法;4)通道分离技术的实际应用;5)HSV颜色检测的工业实践案例。文章强调掌握颜色空间转换是视觉项目的基础,能有效解决工业检测、机器人视觉等实际问题,建议通过示例代码直观理解各种
最近AI模型层出不穷,但是对于我来说,依旧使用的还是原来的ChatGPT,也会使用deepseek,但是一般编程的相关问题都是在ChatGPT,主要是用习惯了,而且deepseek经常不会响应,这一点很烦,所以还是选择ChatGPT多一点,但是ChatGPT的问题就是他说我干,一点都不节省我的劳动力,还有一个问题就是他不好读取我的文件内容,所以有时候答非所问,然后平常也在各大网站看大家关于AI解放
