




- @qq_53092944
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
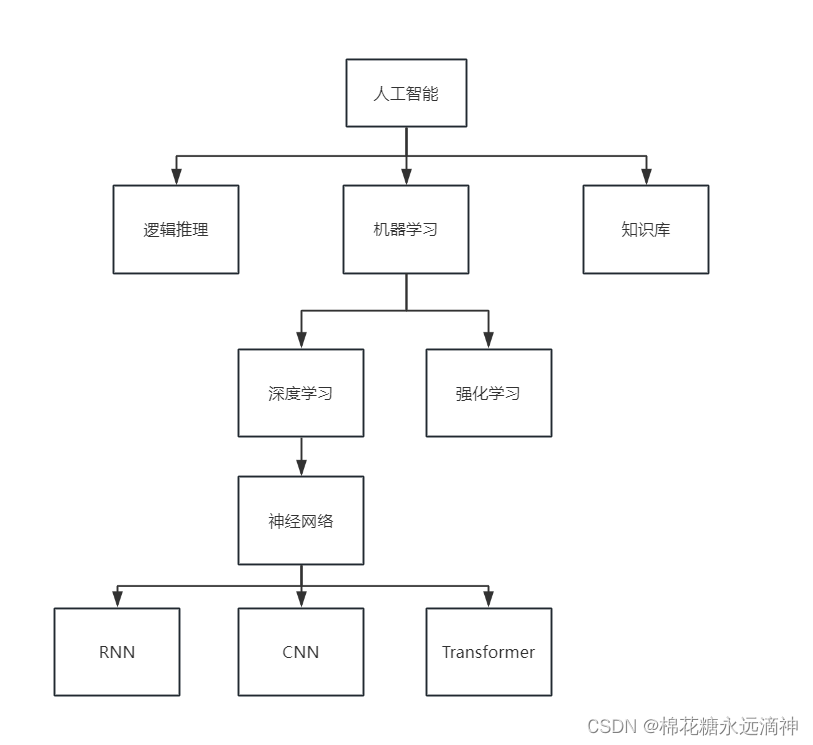
题目:《基于 Transformer 的车辆轨迹预测及变道意图识别方法研究》-吉林大学都业铭本文改进了 Transformer 模型, 在 Argoverse 数据集、NGSIM 数据集上分别设 计了新的模型结构, 可以分别完成预测车辆行驶轨迹和车辆换道意图识别任务。
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档。
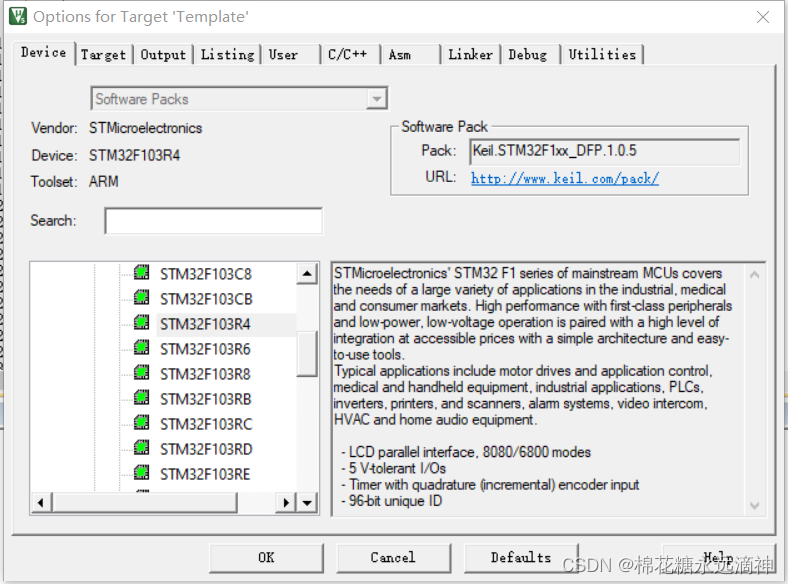
比如F103ZET6芯片,宏定义为:STM32F10X_HD,USE_STDPERIPH_DRIVER。
关于深度学习目标检测,有许多概念性的东西需要先了解一下。这里主要以基于深度学习的目标检测算法的部署实现来学习。

save txt"""Arguments:Returns:"""# 计算指标的关键函数之一# iou:[0.5:0.95],10个不同的iou阈值下,计算标签与预测的匹配结果,存于矩阵,标记是否预测正确def run(data,......):"""# 函数run()的处理流程如下:1. 加载模型;2. 加载数据;3. 网络预测,NMS处理;4. 计算AP,mAP;5. 绘制指标图;6. 保存结果

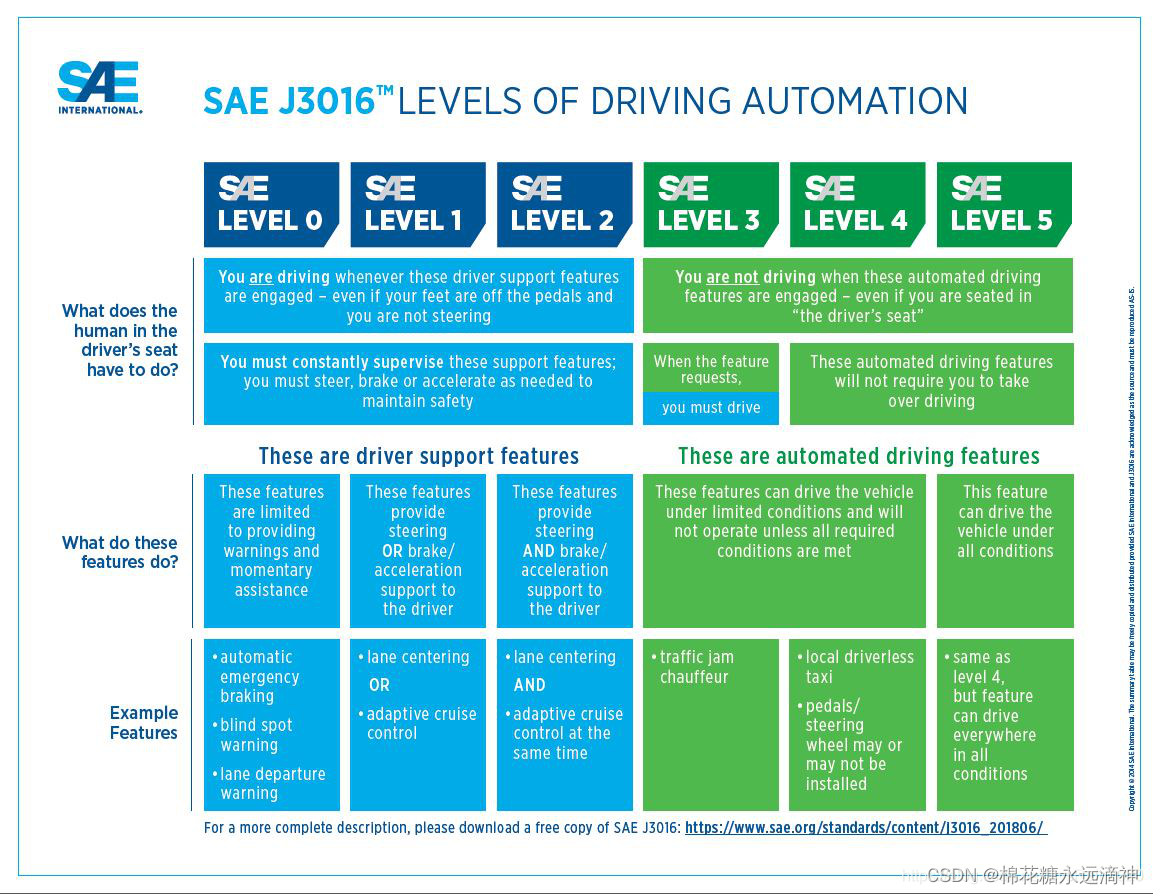
以下为《汽车驾驶自动化分级》具体标准:0 级驾驶自动化(应急辅助)驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动 态驾驶任务中的部分目标和事件探测与响应的能力。需要指出的是,0级驾驶自动化不是无驾驶自动化,0级驾驶自动化可感知环境,并提供报警、辅助或短暂介入以辅助驾驶员(如车道偏离预警、前碰撞预警、自动紧急制动等应急辅助功能)。此外,不具备目标和事件探测与响应的
save txt"""Arguments:Returns:"""# 计算指标的关键函数之一# iou:[0.5:0.95],10个不同的iou阈值下,计算标签与预测的匹配结果,存于矩阵,标记是否预测正确def run(data,......):"""# 函数run()的处理流程如下:1. 加载模型;2. 加载数据;3. 网络预测,NMS处理;4. 计算AP,mAP;5. 绘制指标图;6. 保存结果
题目:《基于 Transformer 的车辆轨迹预测及变道意图识别方法研究》-吉林大学都业铭本文改进了 Transformer 模型, 在 Argoverse 数据集、NGSIM 数据集上分别设 计了新的模型结构, 可以分别完成预测车辆行驶轨迹和车辆换道意图识别任务。
关于深度学习目标检测,有许多概念性的东西需要先了解一下。这里主要以基于深度学习的目标检测算法的部署实现来学习。
比如F103ZET6芯片,宏定义为:STM32F10X_HD,USE_STDPERIPH_DRIVER。