
写文章




- @qq_46202265
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
完整的Ubuntu18.04+ROS+PX4+Anaconda+PyTorch+GPU+CUDA+CUDNN+XTdrone配置智能无人机开发环境搭建过程
从Ubuntu18双系统的安装到CUDA、ROS、Anaconda、PyTorch等的安装,包括我踩坑得到的经验,全部在里面
完整的Ubuntu20.04+ROS+PX4+Anaconda+PyTorch+GPU+CUDA+CUDNN+XTdrone配置智能无人机开发环境搭建过程
在ubuntu20.04下安装一系列东西(测试版)
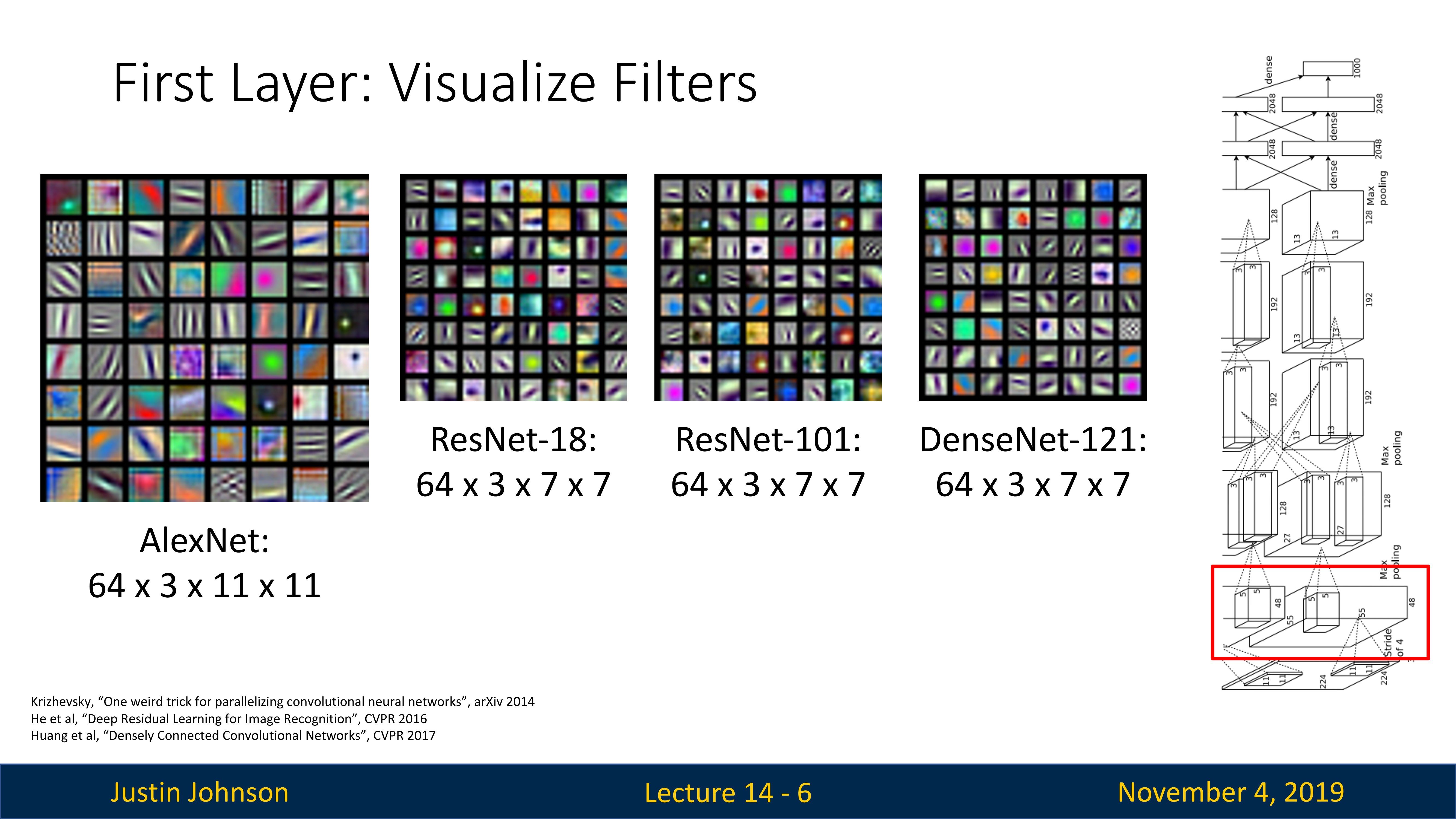
14.卷积神经网络的可视化与理解
在之前我们讨论了一系列内容但是我们在面对视觉任务的时候,我们如何判断神经网络学到了什么,假设我们训练了一个卷积神经网络模型,那么神经网络内部寻找的中间特征是什么,如果能够观察神经网络内部并了解不同的层在寻找什么特征。
完整的Ubuntu18.04+ROS+PX4+Anaconda+PyTorch+GPU+CUDA+CUDNN+XTdrone配置智能无人机开发环境搭建过程
从Ubuntu18双系统的安装到CUDA、ROS、Anaconda、PyTorch等的安装,包括我踩坑得到的经验,全部在里面
完整的Ubuntu20.04+ROS+PX4+Anaconda+PyTorch+GPU+CUDA+CUDNN+XTdrone配置智能无人机开发环境搭建过程
在ubuntu20.04下安装一系列东西(测试版)
14.卷积神经网络的可视化与理解
在之前我们讨论了一系列内容但是我们在面对视觉任务的时候,我们如何判断神经网络学到了什么,假设我们训练了一个卷积神经网络模型,那么神经网络内部寻找的中间特征是什么,如果能够观察神经网络内部并了解不同的层在寻找什么特征。
到底了