




- @qq_42222110
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
0.前言最近整理了“相机成像原理”和“视差与深度信息”相关的资料,然后做成了PPT,以备自己用,也提供给相关的图像、视觉方向的朋友参考。如有误,望海涵并指出。1.正文图像处理、立体视觉等等方向常常涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。例如下图:构建世界坐标系只是为了更好的描述相机的位置在哪里,在双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。接
xyz_to_object_model_3d算子出现了栈溢出使用xyz_to_object_model_3d算子出现了栈溢出情况,请问有没有出现同样问题的小伙伴???
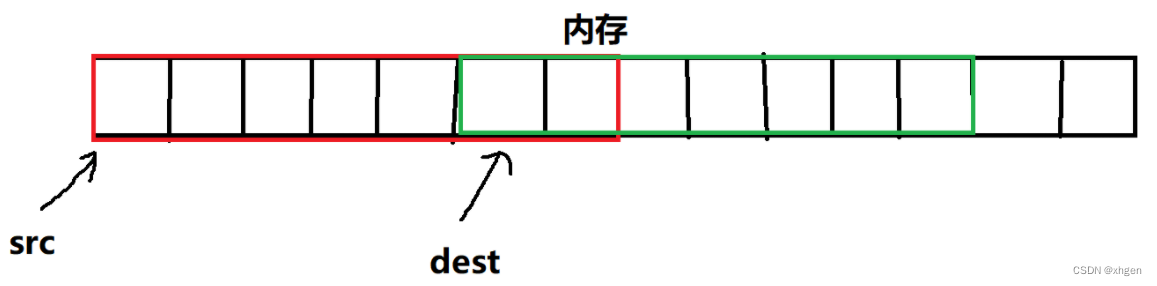
即把所有点的 x、y、z 值分别放到独立的数组中其中,计算难点在于步骤③,最经典的做法是使用 Jacobi 迭代计算算法,在数值分析课程中是一节基础,Jacobi 算法还是可以优化的。 还可以使用矩阵分解算法等进行优化。...
【代码】halconHObject与opencv的Mat格式的相互转换。

0.前言最近整理了“相机成像原理”和“视差与深度信息”相关的资料,然后做成了PPT,以备自己用,也提供给相关的图像、视觉方向的朋友参考。如有误,望海涵并指出。1.正文图像处理、立体视觉等等方向常常涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。例如下图:构建世界坐标系只是为了更好的描述相机的位置在哪里,在双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。接
坐标系变换方程
一、背景Calibration是机器人开发者永远的痛。虽然说方法说起来几十年前就有,但每一个要用摄像头的人都还是要经过一番痛苦的踩坑,没有轻轻松松拿来就效果好的包。其实人类不就是个手眼协调的先进“机器人”吗,O(∩_∩)O哈哈~机器人视觉应用中,手眼标定是一个非常基础且关键的问题。简单来说手眼标定的目的就是获取机器人坐标系和相机坐标系的关系,最后将视觉识别的结果转移到机器人坐标系下。手眼标定行业内
求空间中两条直线的交点求交点坐标的问题完全可以用数学的方法求得结果的表达公式来解决啊设P1(x1,y1,z1),P2(x2,y2,z2) L2:P3(x3,y3,z3),P4(x4,y4,z4)记xi-xj=xij,ij是下标 (或xij,yij,zij表示该直线的方向向量)利用参数式,设:L1方程 x=x1+x12t, y=y1+y12t,z=z1+z12tL2方程 x=x3+x34s, y=y