- @qq_40387714
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
RK平台上有RGA (Raster Graphic Acceleration Unit) 加速,使用RGA可以减少资源占用、加速图片处理速度。因此,在部署YOLOv8是针对RGA和OpenCV的分别进行了实现,并对性能、速度和资源占用进行对比。

对YOLOv8和YOLOv8-pose,使用RKNN官方代码转ONNX,主要用于在RK3588上的模型部署,方便后续ONNX转RKNN,可以使用RK官方代码一键转换+部署。
手部姿态估计、手势识别和手部动作识别等任务时,可以转化为对手部关键点的分布状态和运动状态的估计问题。本文主要给出手部关键点数据集获取的方式。总共获取三个数据集:handpose_v2、HaGRID-pose和hand_keypoint_26K。正样本总计:593,661张图片(53.33W张用于训练,6.04W张用于验证和测试)。

实际工程中,仅仅使用采集到的数据(或者说单一的数据集)进行训练,会导致网络在真实未知的场景下,极其容易发生误检。因此,网络需要见识不同的场景数据才更具有鲁棒性。

原始deepsort主要用于行人、车辆追踪,因此不区分类别,只给出跟踪id。自己使用的场景中,存在不同类别的物体需要跟踪,希望能够对每一类物体的跟踪id,分别从0开始编号。

使用一欧元滤波减少YOLOv8-pose姿态估计获取的关键点的抖动问题。
使用YOLOv8-m对图像进行手部检测,然后扩大检测框区域,并对该区域使用YOLOv8-s-pose使用关键点检测,实现实时的手部关键点检测。
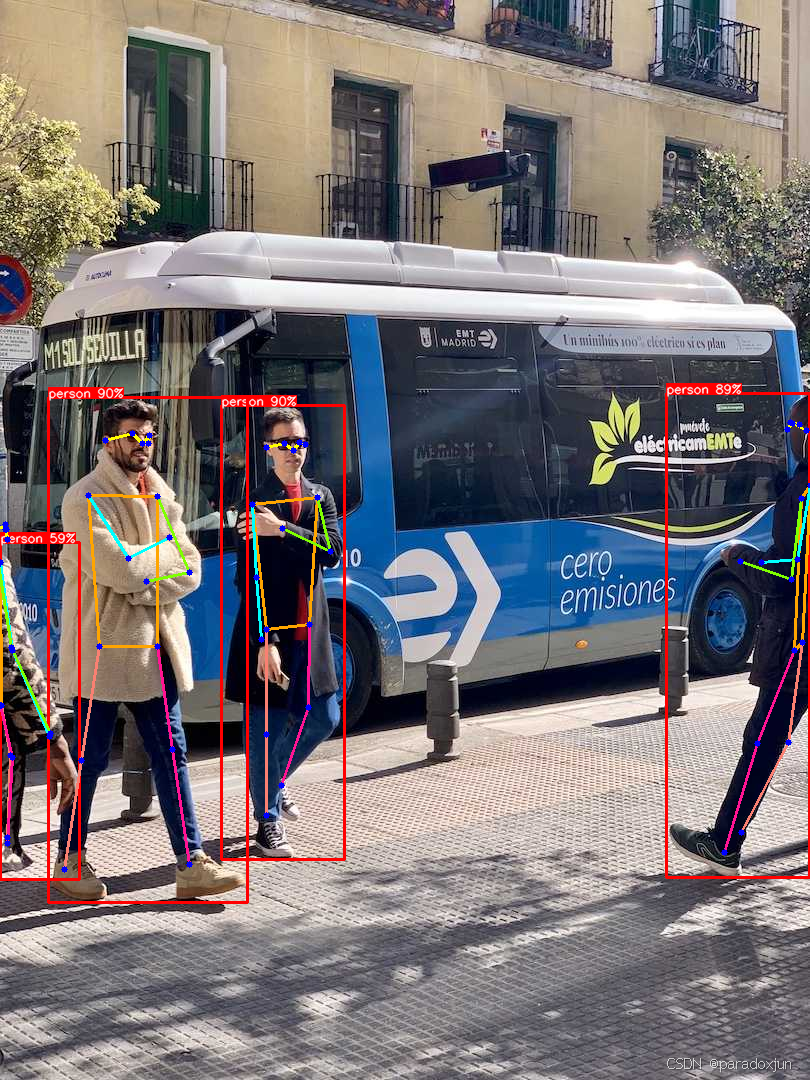
在COCO-pose数据集上,更完整的yolov8-pose结果,用于后续实验对比。
RK平台上有RGA (Raster Graphic Acceleration Unit) 加速,使用RGA可以减少资源占用、加速图片处理速度。因此,在部署YOLOv8是针对RGA和OpenCV的分别进行了实现,并对性能、速度和资源占用进行对比。
COCO标签转YOLO:将下载的训练集标签instances_train2017.json和验证集标签instances_val2017.json转成YOLO格式。