




- @qq_39448789
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
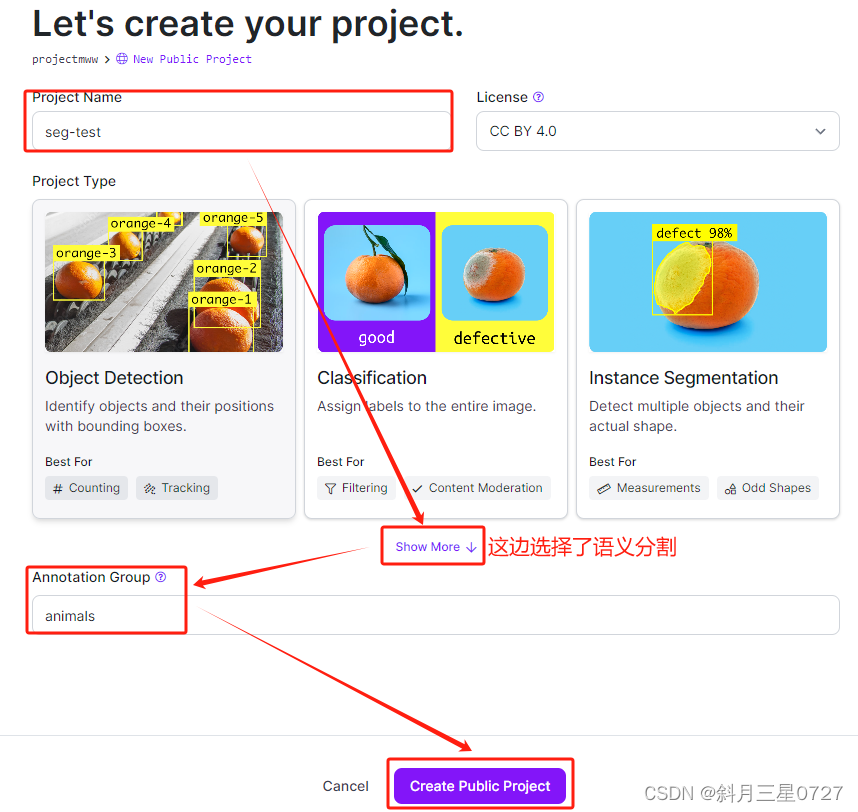
labelimg/labelme/Roboflow,此处选用Roboflow; 下面以实力分割为例,更换任务类型方法如下;
举个例子,基于法二,工序1需要A和B两个个检测对象,工序2需要B和C两个检测对象。检测到正在实现工序1则只显示A和B框,完成工序1提示需要完成工序2(这时也可以记录时间点作为动作开始的时间,用于计算工作效率等等),此时只显示B和C的检测框。存在两个问题:1.demo检测的是本地视频,视频是”精心“挑选过的,所以看着效果很好,细看还是有漏检误判的情况;2. 实时性,在4070显卡上测试,从打开摄像头

Jetson并未正式支持 Windows,因此补丁的功能是否也包含在 Windows 内核中值得怀疑,但理论上如果有人要移植它们(遵循 L4T 源代码和 TX1 SoC 技术参考手册),且只需要调度有限的 GPU 支持,是一个可行的方案。它是基于Linux内核的一个分支,包含了针对Jetson平台的特定驱动和优化,以及一些额外的功能和工具。L4T kernel的主要作用是为Jetson平台提供稳定

1. Kaggle网址—https://www.kaggle.com/;一个为开发商和数据科学家提供举办数据科学竞赛、托管数据、编写和分享代码的在线平台。2. Paper with code网址—https://paperswithcode.com/;3. Roboflow网址—https://roboflow.com/;号称拥有世界上最大的计算机视觉开源数据集与API(含11w+个数据集/1y+

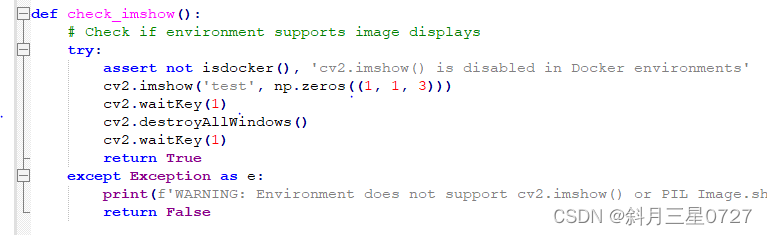
运行yolov7中detect.py进行本地摄像头的实时检测不显示图像。查看dectect.py,在打开摄像头之前调用了check_imshow(),该函数返回False。
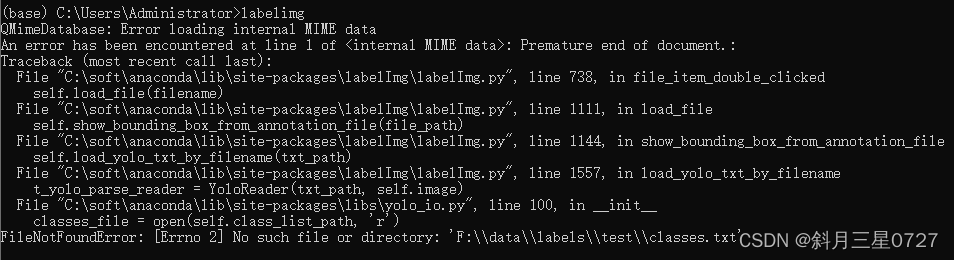
原模型使用的数据集只有标签A,现有另外的已标注数据集加入,但是含有其他标签B,通过手动修改标签文件中的索引后,无法在labelimg中查看标注情况。
学习率lr很大程度上影响收敛速度和泛化性能。收敛速度很好理解,对泛化性能的影响却不是很直观。泛化性指模型经过训练后,应用到新数据并做出准确预测的能力。lr影响收敛,即模型训练不恰当(过拟合/欠拟合),准确率P和召回率R有所下降,影响模型的输出,即模型泛化性能差。话回lr,相比于固定学习率,周期性学习率策略被证明是更有效的训练方式,如fastai中的[one cycle学习率策略](https://
