




- @qq_38190041
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
编码器零点电角度偏移量同步电机的控制,转子的位置是必要的反馈。电机的磁极的换向,控制的是电角度。编码器的安装和电角度,存在误差。机械角度的反馈,在多极对数时,需要做一个电角度的转换,进入控制的转子位置的反馈。(一个电角度周期=编码器分辨率/极对数)所以在控制起初的编码器零点的电角度偏移量就是很重要的一个参数,角度不对,Iq、Id的控制就不准确了。当知道1.此时转子的电角度2.编码器的值。计算编码器
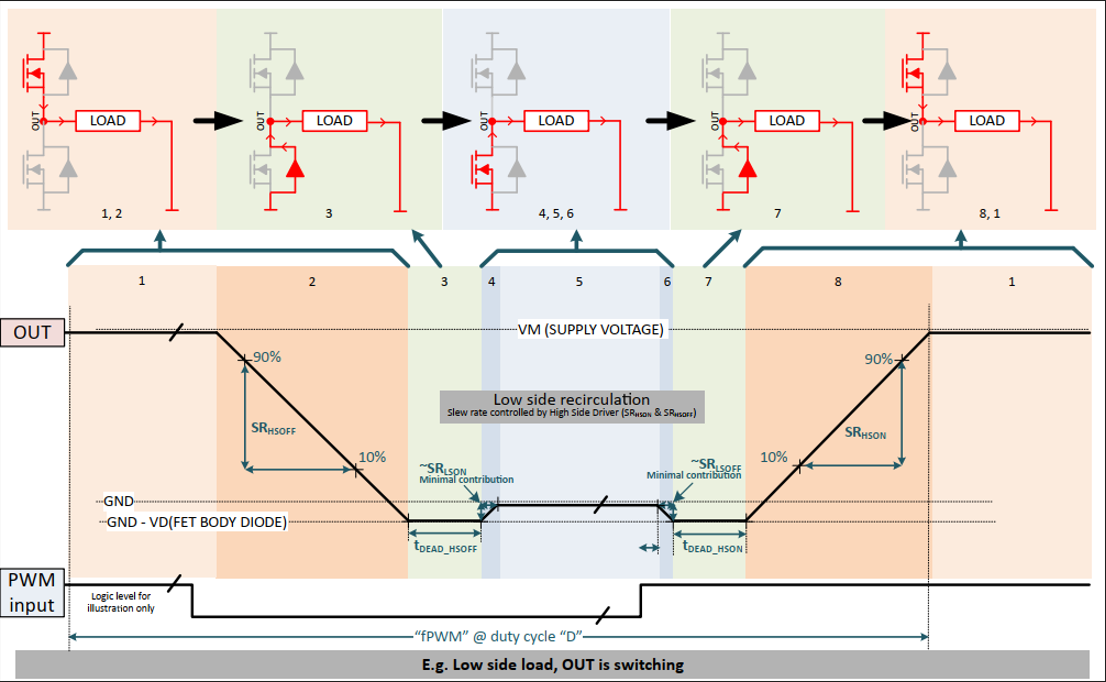
在为电机应用或具有电感特性的负载选择集成 H 桥或半桥驱动器时,必须考虑由于负载电流和输出的 PWM 开关以进行电流调节而导致的驱动器功耗。器件上消耗的功率会使器件的结温超过环境温度,具体取决于热阻抗。热阻取决于 IC 的特性(封装、芯片尺寸等)和 PCB 设计,这通常是给定驱动器提供多少电流的限制因素。要计算给定应用中的最大允许电流,需要估算电机驱动器的总功耗。本应用报告展示了如何估算功率 FE
安装pytesseract库,必须先安装其依赖的PIL及tesseract-ocr,其中PIL为图像处理库,而后面的tesseract-ocr则为google的ocr识别引擎。一、安装PIL(换源)pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pillow二、安装Tesseract-OCR它的git:https://git...
一、鸿蒙的相关网站鸿蒙官网:https://www.harmonyos.com/cn/home/源码托管Gitee:openharmony.gitee.com开发套件合作社区:http://www.hihope.org/官方合作社区(51CTO、电子发烧友):https://harmonyos.51cto.com/https://bbs.elecfans.com/harmonyos在gitee的源
毕业前想去做物联网还是或者linux,结果玩了一年多的电机控制,早就深知matlab/simulink绕不过的,拖到现在,下班晚上再把大学自控做实验用的matlab捡起来,再去b站学习simulink。做控制,matlab/simulink是绕不过的,这是个很强大的仿真工具。如果学习simulink是做电机控制的,我推荐b站的:CELEC(陈诚电气)https://space.bilibili.c
前几天小米的铁蛋,又让四足机器人火了一把。9999一台,这个价钱还挺香的。众所周知,国内的大部分四足机器狗的涌出,都是因为2019年,MIT的猎豹开源,从硬件到软件。国内四足机器人的研发也就上了一个台阶,也包括小米的铁蛋也是基于mit的Cheetah Mini。最近看了一下mit的机器狗开源的关节,看了一下12个关节到控制器的是如何通信的。简单的画了个图:模块通信12个关节驱动器,只运行了FOC的
CANopen总线_CANOpen开源协议栈
首先向b站up,DR_CAN致敬。二刷了,为了收获,理解更多,用极慢的方式,把笔记抄了一遍,为了好翻阅。state-space状态空间方程质量-弹簧-阻尼经典系统的微分方程,拉普拉斯变换介绍了状态空间方程的表示推导了状态空间方程和传递函数的关系,极点和特征值的关系。特征值和极点一样,决定着系统的稳定性被抛弃的写随笔公众号改写技术文章了,感兴趣的可以关注公众号:王崇卫...
之前的笔记:[现代控制理论]5_系统的可控性_controllability[现代控制理论]4_PhasePortrait爱情故事动态系统分析[现代控制理论]3_Phase_portrait 相图 相轨迹[工程数学]1_特征值与特征向量[现代控制理论]2_state-space状态空间方程视频链接:https://www.bilibili.com/video/BV1vx411V7EH?spm_id
反步设计法的基本思想是将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统设计部分Lyapunov函数和中间虚拟控制量,一直“后退”到整个系统,将它们集成起来完成整个控制律的设计。这节课笔记排版比较费时,公式相对比较多一点。视频:https://www.bilibili.com/video/BV1BW411M7v4?spm_id_from=333.999.0.0Feedback Lin