
写文章




- @qq_38041309
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
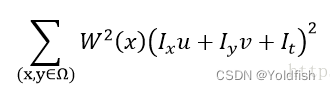
【从零开始学习光流算法】(一)基本假设及Lucas-Kanade(LK)光流法
在使用PX4FLOW时,发现在蒙住声纳传感器时,相机仍然能够输出角速度,这让我感到很困惑,于是干脆学习一下光流算法,也为之后SLAM学习做一点铺垫。T-Jhon。
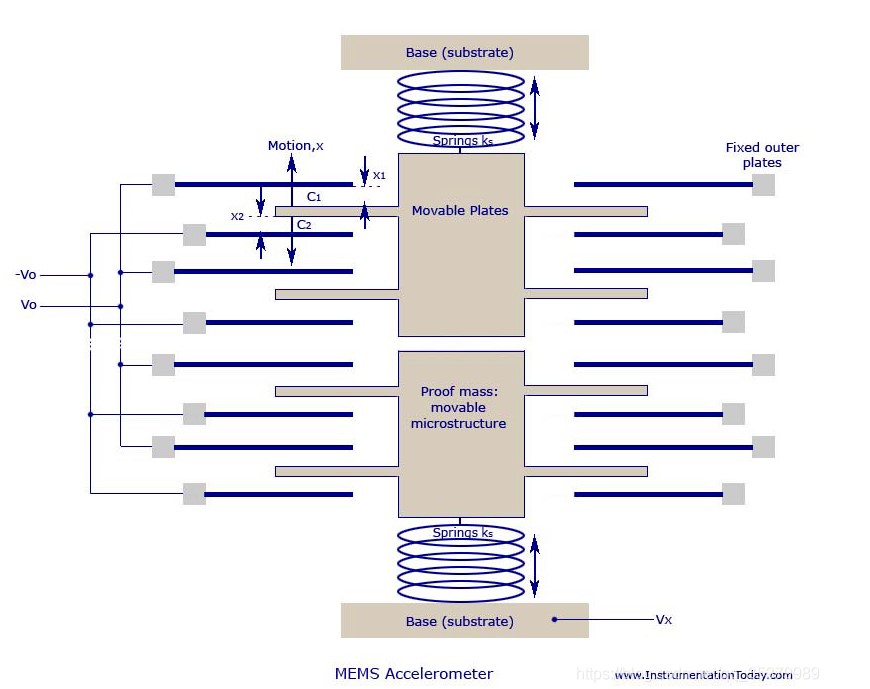
【初识导航设备】(一)飞行器中传感器测量原理及测量模型
传感器就是机器的五官,让机器知道自己是什么状态。
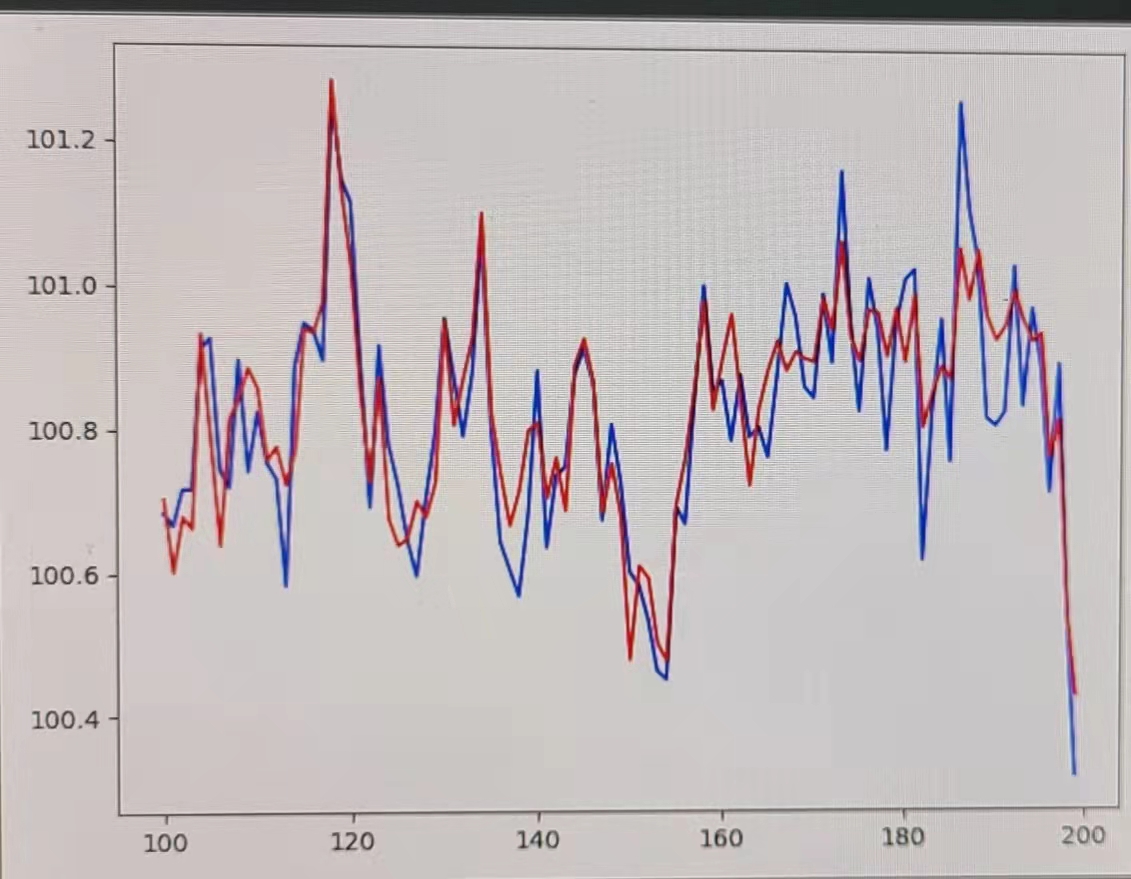
【飞控初体验】(二)python实现卡尔曼滤波+PID模拟简单定高飞行
python实现卡尔曼滤波+PID模拟简单定高飞行模拟事件飞机从地面起飞到目标高度并停留。只跟踪状态量——飞机高度(exp_alt),传感器只获取飞机高度值。实现步骤-------------------------------PID部分-----------------------------------1、获取飞机当前时刻高度(pre_alt);2、计算与目标高度的PID误差,即比例误差(no
【初识导航设备】(一)飞行器中传感器测量原理及测量模型
传感器就是机器的五官,让机器知道自己是什么状态。
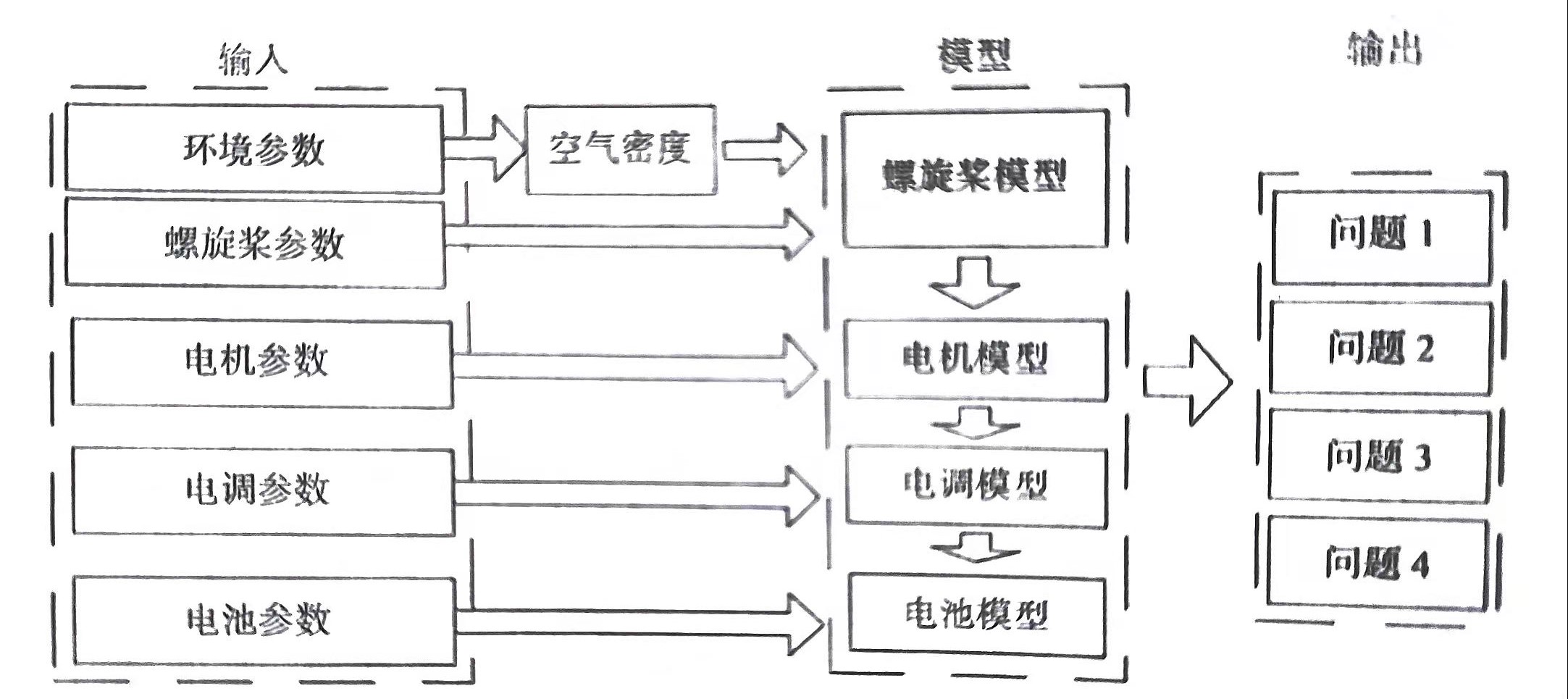
【飞控初体验】(三)四旋翼无人机动力系统建模
四旋翼无人机动力系统建模,包括螺旋桨、电机、电调及电池
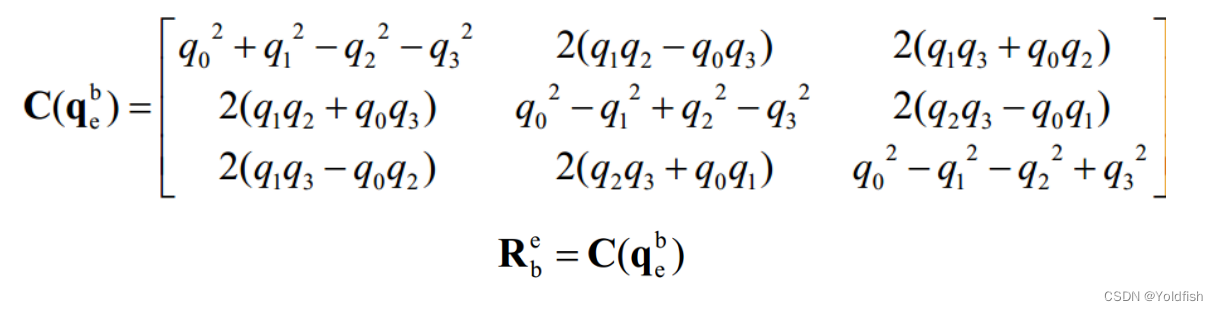
【姿态解算初体验】(三)四元数姿态表示总结
四元数姿态表示总结,不深究公式推导,只理清怎么使用
到底了