- @qq_36654593
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了 ED-CLAWBOX 工业级 AI 智能体盒子结合 OpenClaw 实现文献阅读、论文复现、论文写作、文章润色数据绘图、学术报告等功能的论文 AI 助手,包括介绍、功能测试、效果演示等,为该产品在教育、科研领域的快速开发和应用设计提供了参考。

本文介绍了 ED-CLAWBOX 工业级 AI 智能体盒子结合 OpenClaw 实现文献阅读、论文复现、论文写作、文章润色数据绘图、学术报告等功能的论文 AI 助手,包括介绍、功能测试、效果演示等,为该产品在教育、科研领域的快速开发和应用设计提供了参考。
本文介绍了 ED-CLAWBOX 工业级 AI 智能体盒子使用 OpenClaw 快速实现科学计算的项目设计,针对复杂物理问题的数值求解给出解决方案,包括原理分析、公式推导、代码解析、科学绘图等。

本文介绍了“小龙虾” PicoClaw 结合 ChatECNU 大语言模型部署于树莓派 Zero 2W 开发板的项目设计,包括准备工作、环境搭建、功能测试等。
本文介绍了基于 ChatECNU 大语言模型和 Linux 开发板部署 OpenClaw,实现智能对话和终端控制的项目设计,包括环境搭建、OpenClaw 部署、功能测试等,为相关产品在边缘 AI 领域的快速开发和应用设计提供了参考。

本文介绍了工业树莓派 CM0 NANO 单板计算机结合 OpenCV 人脸识别和 PWM 舵机控制实现智能门禁系统的项目设计,包括硬件连接、舵机控制、网页服务器、前端UI设计、环境部署、关键代码、效果演示等流程,为相关产品在边缘 AI 领域的快速开发和应用设计提供了参考。

本文介绍了树莓派 CM0 NANO 单板计算机通过本地部署 py-xiaozhi 小智实现 AI 智能体语音对话的项目设计,为相关产品在工业 AI 领域的快速开发设计和应用提供了参考。
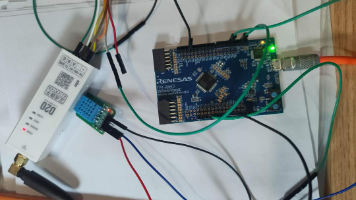
本文介绍了瑞萨 FPB-RA6E2 开发板使用 Zephyr 开发环境结合 DHT11 传感器和 DTU 模块,通过 MQTT 上传数据实现物联网温湿度计的项目设计。
本文介绍了昉·星光 VisionFive2 Lite 单板计算机结合芯片内置温度传感器获取 SoC 温度数据,并通过 MQTT 协议完成温度的云端上传,以及接入 Home Assistant 智能家居平台,实现 SoC 温度的物联网实时监测的项目设计,为相关产品在工业物联网、智能家居、消费电子等领域的快速开发和产品应用提供了参考。

本文介绍了树莓派 CM0 Dev Board 的实现 Home Assistant 智能家居终端的项目设计,包括准备工作、环境搭建、驱动传感器、MQTT 消息上传、流程图、关键代码以及效果演示等,为相关产品在工业物联网领域的开发设计和快速应用提供了参考。