- @qq_35831906
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
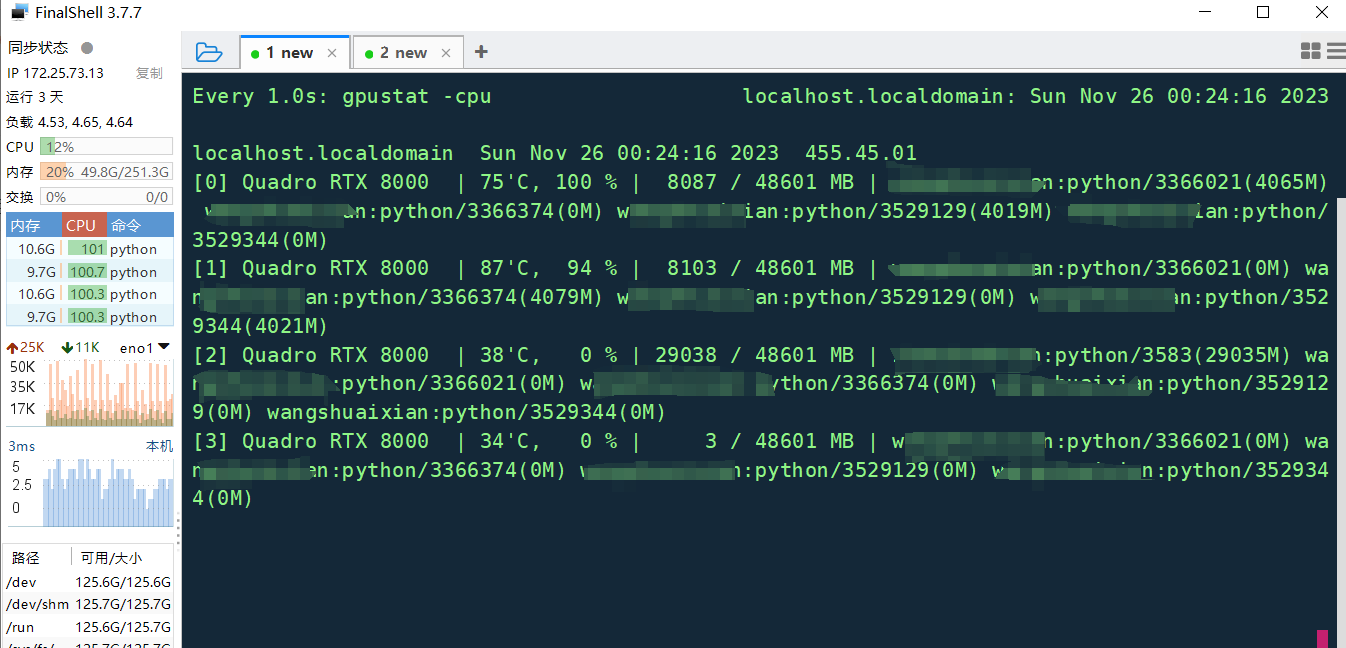
: 一些深度学习框架在初始化时默认会使用所有可见的GPU。即使你在代码中明确指定了两个GPU,框架仍可能会在所有四个GPU上启动线程。这是一种默认行为,你需要通过框架的配置来明确指定使用的GPU,【问题已解决】
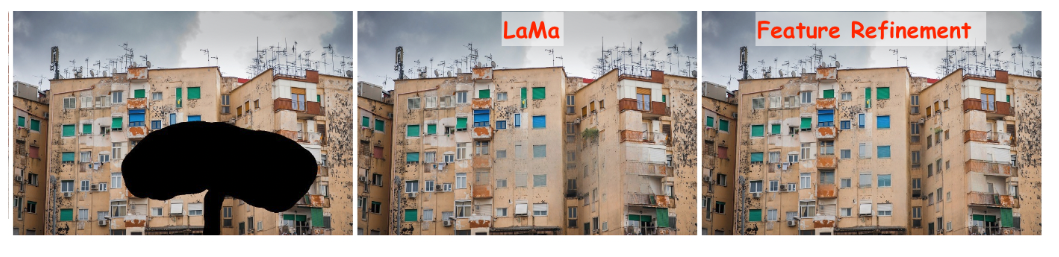
simple-lama-inpainting是LaMa的一个简便版本,已开发pypi packpage 安装包。simple-lama-inpainting 源码:simple-lama-inpainting 安装包安装命令如果安装出现以下错误则更换python3.9 以上版本,亲测可行。
SemExp探讨了目标导航问题,涉及在未知环境中导航到给定对象类别的实例。端到端的基于学习的导航方法在这项任务中面临困难,因为它们在探索和长期规划方面效果不佳。我们提出了一种模块化系统,名为“目标导向语义探索”,它构建一个情景语义地图并利用它根据目标对象类别高效地探索环境。视觉上逼真的仿真环境中的实证结果显示,所提出的模型在多个基准测试中表现优异,包括端到端学习方法以及基于模块地图的方法,并且在C
请确保在服务器和本地机器上都已经正确安装了TensorFlow和TensorBoard,并且服务器上TensorBoard的端口是6006。如果你在服务器上运行了TensorBoard,并希望从本地机器查看TensorBoard,你可以使用SSH隧道(SSH tunneling)来将远程服务器上的TensorBoard端口映射到本地。这个命令会在本地机器上创建一个端口映射,将本地的6006端口映射

【已解决】from pytorch_lightning.callbacks import Callback # noqa: E402 OSError: [WinError 127] 找不到指定的程序。

【已解决】from pytorch_lightning.callbacks import Callback # noqa: E402 OSError: [WinError 127] 找不到指定的程序。
报错信息 "CUDA out of memory" 表明你的 PyTorch 代码尝试在 GPU 上分配的内存超过了可用量。这可能是因为 GPU 没有足够的内存来处理当前的操作或模型。如果你的模型或处理过程需要的内存超过当前 GPU 容量,可能需要考虑使用具有更多内存的 GPU 或使用提供更好资源的云服务。记得在适当的地方运行此代码段,特别是在你使用完特定张量或批次后,将内存释放回 GPU。考虑使

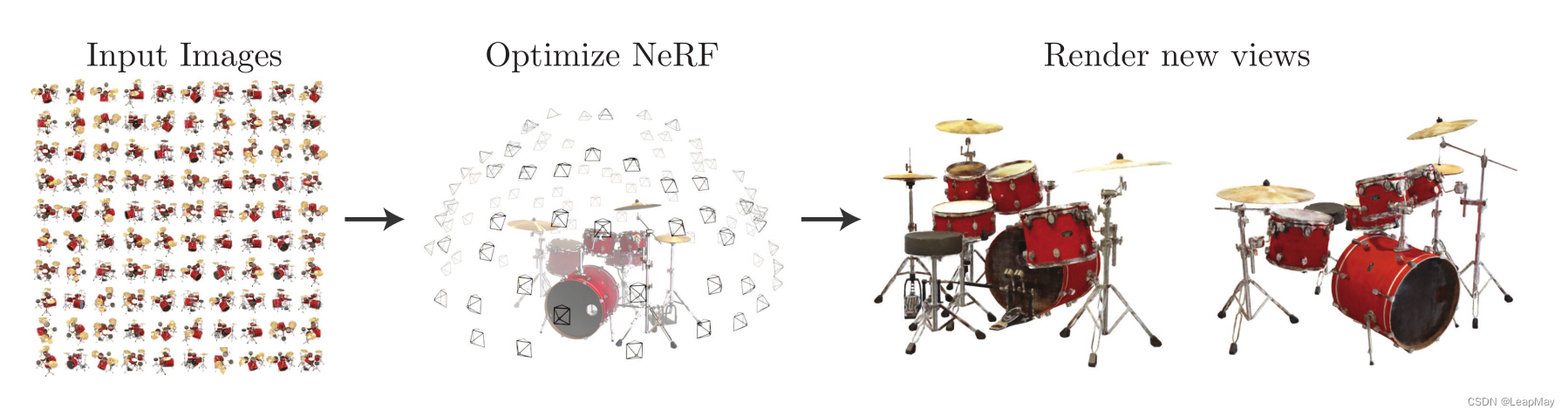
NeRF论文第一篇:NeRF的关键思想是通过从不同视点捕捉到的一组图像来训练神经网络,以逼近体积场景函数。在训练过程中,网络接受场景中的一个三维点作为输入,并输出该点的颜色。通过使用大量的输入-输出对来优化网络的参数,NeRF学习捕捉场景的复杂光照和视角相关效果。
对于在word中写的论文一般是使用【审阅】-【比较文档】来输出对比结果;对于overleaf,使用LaTeX排版,如何通过标记文字颜色来实现对比效果呢??

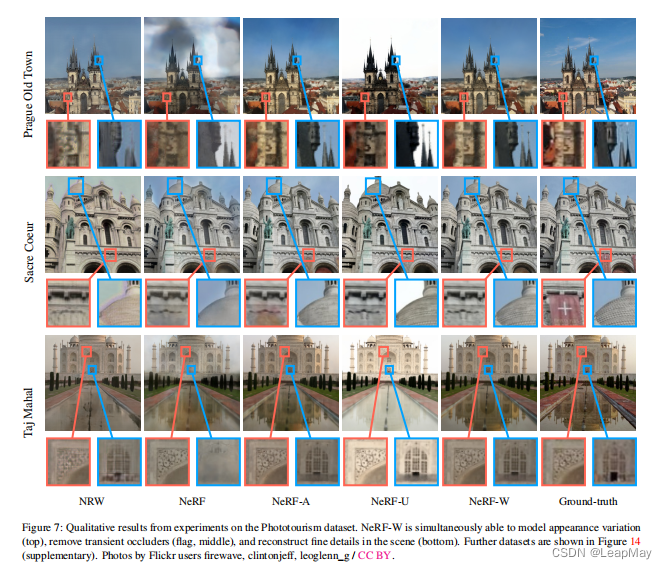
我们提出了一种基于学习的方法,利用非结构化的野外照片集合合成复杂场景的新视角。我们在神经辐射场(NeRF)的基础上进行了改进,以解决在真实世界的图像中存在的光照和遮挡等问题。我们将我们的方法命名为NeRF-W,并将其应用于互联网上著名地标的照片集合,展示了更接近真实照片的新视角渲染效果。