




- @qq_35379989
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
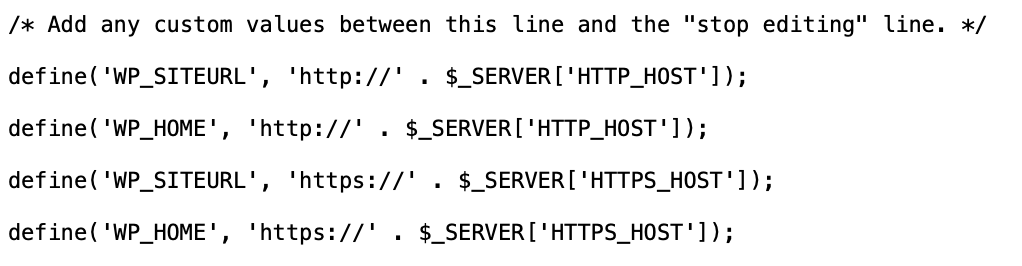
此文讲述了wordpress网站 如何开启多域名访问,以及让网站支持https。经过本教程步骤,可让网站通过不同的http/https域名访问,且不强制跳转。
近期在完成一项项目时,遇到一个问题,就是生成0-1之间的随机数,且要求不同区间之间的权重不同,如0-0.8权重为0.3,0.8-1权重为0.7。由此背景,基于MATLAB的rand函数写了一个分区间不同权重随机数生成函数。%%%权重区间随机数生成函数function [SX]=SS(sn,w,smax)%sn生成随机数的个数,w大区间所在的概率,smax大区间起始位置SX=zeros(sn,1);

做完设计或者体验完ubuntu感觉对它已经失爱了,那么第一时间删除它即可,但是和安装时比较繁琐相似,想要干净的删除它也是比较麻烦的,总体来说为三步1、打开win10下的磁盘管理工具,按Windows键+X键就可以在弹出来的菜单中找到磁盘管理打开后找到你当时安装ubuntu的分区,在哪个分区右击删除卷即可2、刚才已经删除了Ubuntu的系统文件,但是还有grub引导程序没有删除(这时...
算法中总会存在大量的矩阵运算,eigen提供便捷又强大的矩阵运算库,将理论可在C++中得以实现。一下内容为基于官方教程进行的总结,官方教程地址:http://eigen.tuxfamily.org/dox/GettingStarted.html一、定义与赋值在这里说明一下在VS中eigen库的安装方式,我的版本是VS2015如图,点击项目->管理NuGet程序包,在 浏览 中搜索 eigen

1. 选择对的系统安装nvidia驱动为什么说对的系统呢,这是因为在多次尝试后发现,如果使用ubuntu14安装显卡驱动会出现无法进入系统,一直在循环在登录界面,而ubuntu16则不会出现这个问题,所以说最好升级一下吧,毕竟14有点太老了。重要的一点是不要在安装或安装后升级内核,否则cuda无法识别内核而导致安装失败!(如果已经升级并且cuda报错,那么百度或谷歌一下如何降内核吧)先...
以下内容来自于我导师的教导,致谢导师1、集中式多智能体系统:一个智能体集中控制整个系统, 它是一种规划与决策的自上而下式的层次控制结构。 该系统的协调性较好, 但实时性、 动态性较差, 对环境变化响应能力差;2、分散式多智能体系统:各智能体具有高度的自治能力, 自行处理信息、 规划与决策、 执行指令, 与其它智能体相互通讯以协调各自行为, 而没有集中控制单元。 分散式结构有较好的容错能力和...

此文介绍了黑群晖Synology Photos人脸识别在核显无法正常调用,识别速度很慢情况下。一种仅调用CPU人脸识别驱动方式
ROS移动机器人 Solidworks,是设计完各个零件然后组合在一起的,所以适用性很强,可以根据你的需求将绘制的零件加到你的机器人solidwroks三维中。同时,还附带了小车对应的CAD图,可以找淘宝商家制作亚克力板,做一款和我这个一样的移动机器人。还是17年本科时制作的毕业设计,基于solidworks 2014所制作。文件里包含了制作的整个移动机器人的SolidWorks原文件。(2) k

一、引论1.1 数值分析研究对象与特点(1)数值分析定义:研究在计算机上解决问题的理论和数值方法。(计算机只能进行加减乘除四则运算和简单的函数计算,需要转换复杂函数)(2)计算机解决实际问题的步骤:建立数学模型、选择数值方法、编写程序、上机计算1.2 数值计算的误差(1)用计算机进行实际问题的数值计算,往往求得的是近似解,都存在误差上图为计算机...
又到了制作毕业设计的时候了,我分享一下我做的一些移动机器人部分零件把,可以帮助大家省很多时间,制作时我用的是SolidWorks2014的版本。1.激光雷达的三维,我用的是rplidar A1下载地址为:https://pan.baidu.com/s/1xx1x2pC_p8Rb8w4qFSc8OQ2.微软的Kinect传感器下载地址为:https://pan.baidu.c...