




- @qq_31638535
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
模型调优(Model Tuning)是指通过调整机器学习模型的参数和结构,以提高其性能和准确性的过程。在目标检测任务中,调优可以帮助模型在特定类别上达到更高的精度(如AP值),同时减少不必要的计算开销。例如,YOLO模型默认支持多类别检测,但有时我们只需要检测单一类别,并要求该类别的检测效果最佳。通过以上步骤,我们成功从YOLOv8s预训练模型中调优出一个专门检测电视的模型。利用COCO数据集提取

算法主要用途关键方法RawNRRAW 降噪空域滤波、时域滤波、深度学习YUVNRYUV 降噪亮度/色度独立降噪TNR时域降噪多帧融合、运动补偿HDR MergeHDR 合成多曝光合成、AI HDR色调映射Gamma、Retinex、深度学习Demosaic去马赛克插值算法、AI 方法Sharpen图像锐化高通滤波、USM、AIDehaze去雾物理模型、深度学习。

福利:给大家推荐一个很好的网址,可以下载github里面的单独文件,而且不需要安装任何插件https://minhaskamal.github.io/DownGit/#/home
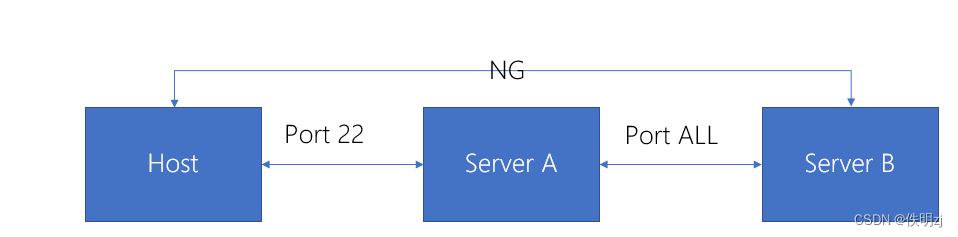
用vscode连接server进行开发, 是非常方便的,但很多时候,server的端口开放的很有限,那么就可以利用vscode进行端口映射。
如何解决vscode终端显示的问题
/etc/docker/daemon.json{//..."data-root": "/mnt/docker",//...}你的docker版本超过v17.05.0,一定要用data-root, graph已经被docker弃用了然后运行docker info你会发现根路径变了,但是一定要注意,如果把data-root换成graph, 查看docker info也是生效的,但是不起作用, 坑爹的.
解决vscode 远程连接问题
需要设置两个文件: tasks.json 和 launch.jsontask 文件(terminal ->config task)是设置编译器的参数设置launch 文件(Debug -> add configuration)是负责调试相关参数设置例子文件如下:launch.json{// Use IntelliSense to learn about possible attribu
前言:连续配了几个晚上,搞深度学习的环境,之前配成功过,但是这次再配的时候,发现遇到的坑和以前不一样,算了,直接上Docker大法,不想为环境再浪费宝贵的时间首先我们先了解一下,docker配深度学习环境需要什么。答:只需1.显卡驱动,2.docker 3.深度学习环境镜像对就是这么简单。1.首要的是显卡驱动,在下载显卡驱动之前先查一下,你即将要安装的版本,最低是多少。...
通过确保数据布局紧凑性,再结合实现高效字节序转换,能够显著提升UDP数据包解析的可靠性与代码可维护性。此方法尤其适用于嵌入式网络协议栈、物联网设备通信等场景。完整代码示例可在实际项目中扩展,加入负载解析、多线程处理等高级特性。
