




- @pingping_TEL
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
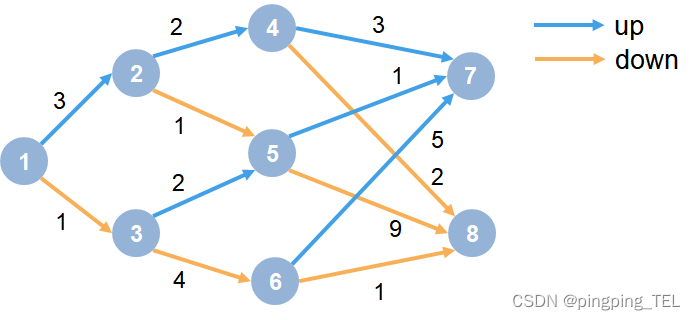
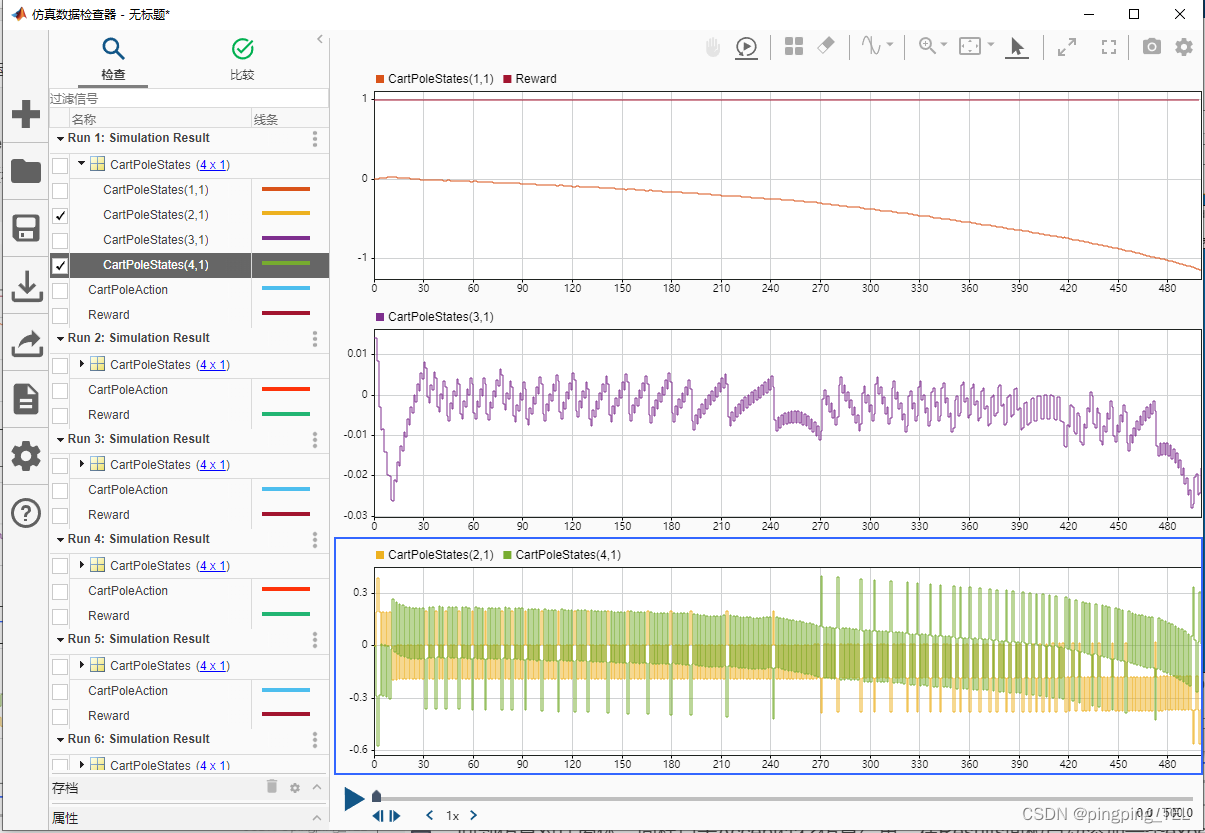
翻译自强化学习工具包文档,加入自己的见解,训练结果是自己跑的。部分对象在高版本的MATLAB中才有,需使用R2022a及以后的版本。用Q-learning解决一般马尔科夫决策过程(MDP)环境。
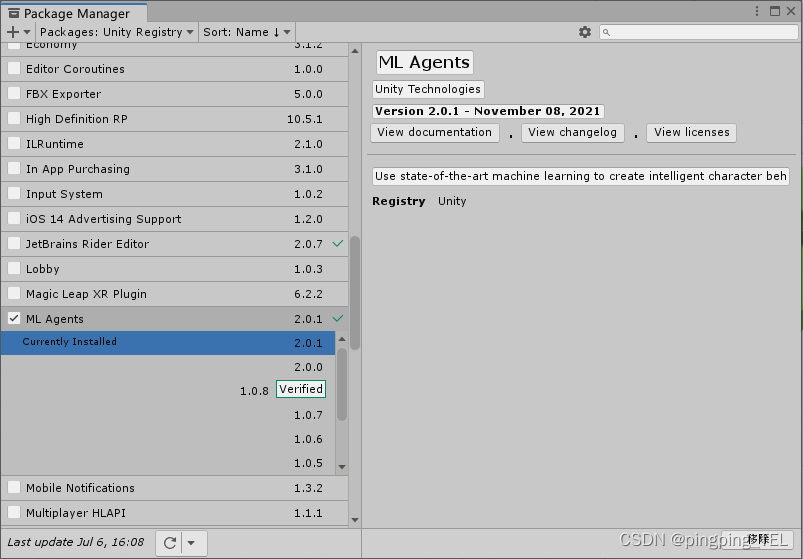
通过Unity Machine Learning Agents工具包在Unity场景中训练强化学习算法,本文主要介绍该包的安装。
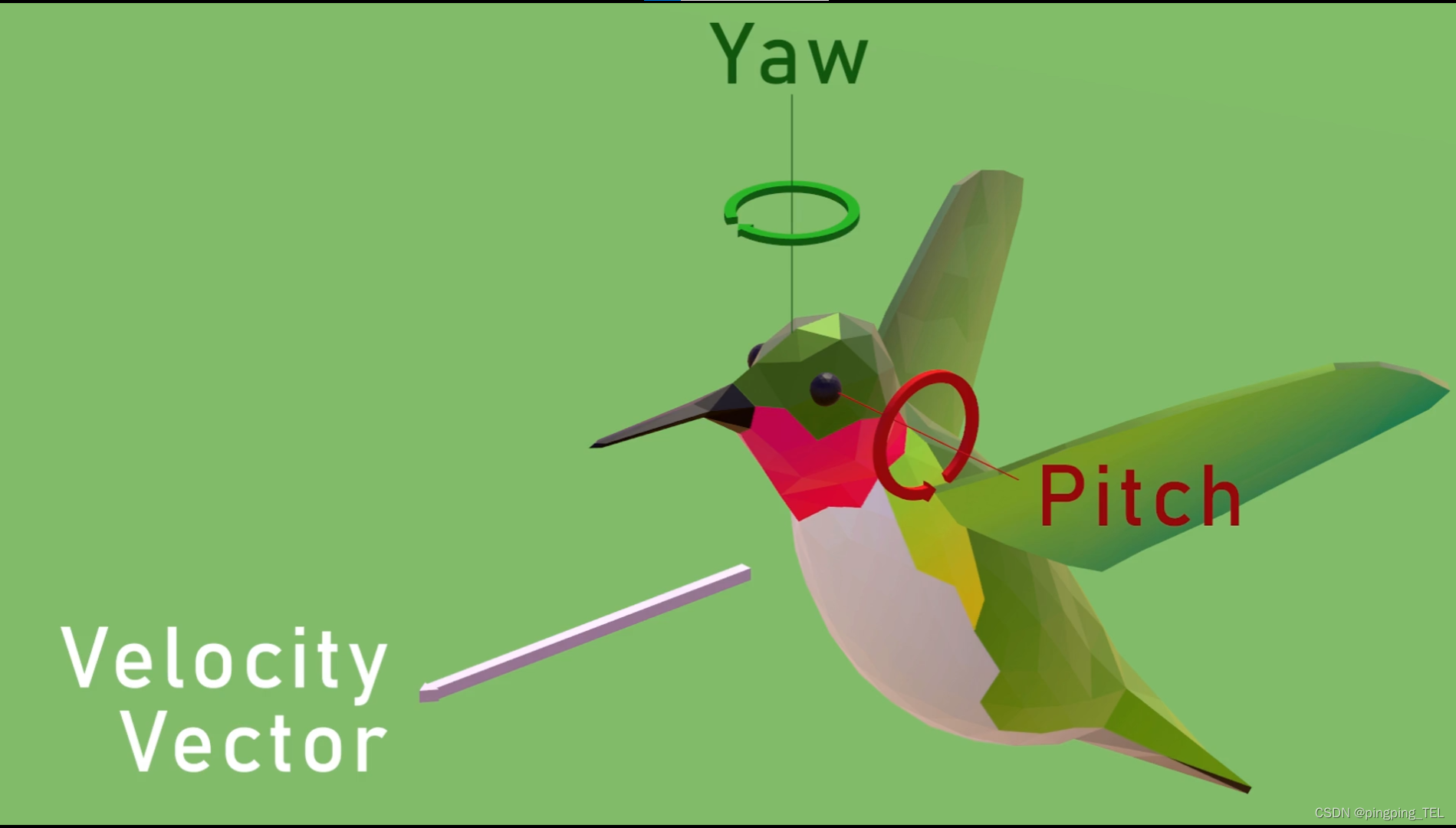
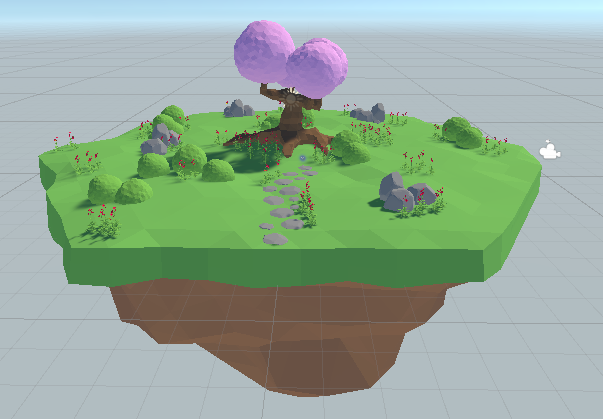
在训练之前,先用手动控制测试一下。根据前面的脚本可知,W、S、A、D分别代表向前后左右移动,E、C代表上下移动,上下箭头代表Pitch,左右箭头代表Yaw。点击Play,用键盘控制蜂鸟采蜜。素材。
任务目标为训练智能飞行的蜂鸟,控制蜂鸟飞到花丛中,用喙蘸取花蜜并饮用。蜂鸟飞行有六个自由度(在本任务中不控制其横摇roll),这意味着它们可以向任何方向飞行和转弯以寻找目标。它们的控制更为复杂,其飞行路径无法用传统的导航系统来解决。
创建C#脚本,包括如何手动控制智能体,智能体的观测空间、动作空间,强化学习的奖励函数等。注:本文所有代码均来自于,仅作学习使用。
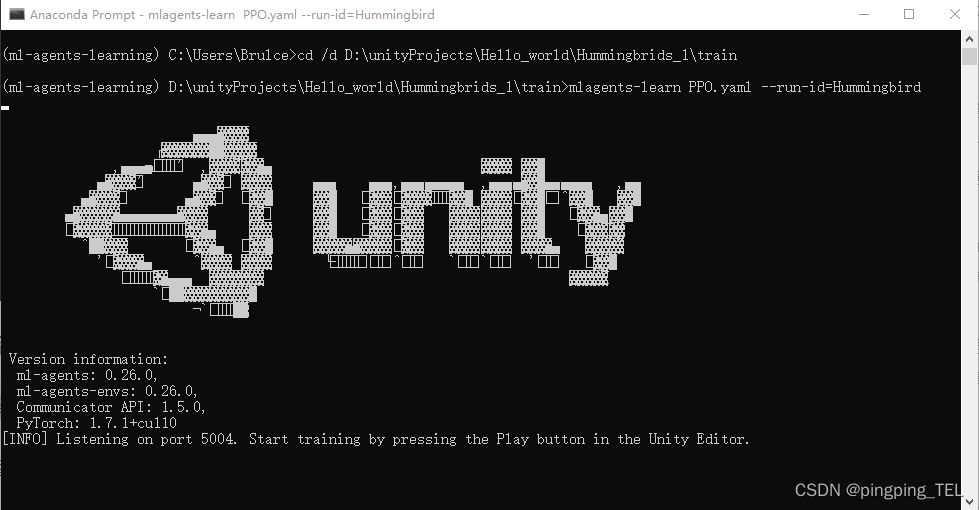
通过窗体程序训练强化学习代理
其中,主要修改传感器的名字,传感器可检测的物体的标签,每个方向射线的数量,射线的最大角度,射线长度。设置投球半径为0,即只有当射线本身投到物体上时才视为射线检测到物体,若不为0则物体进入射线末端球体内即视为检测到物体。按照下图设置参数,同时微调该游戏对象的位置,避免与智能体本身发生碰撞。还需设置另一个传感器来检测智能体上方物体,将上一个复制,修改名字为RayUp,参数设置如下。最后,再设置一个传感
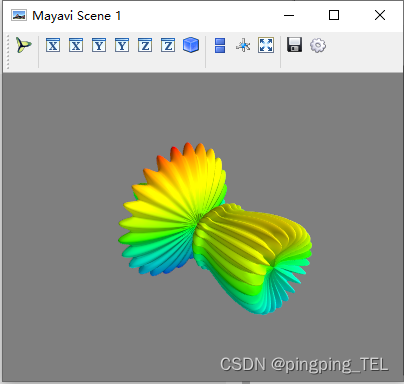
我用Python脚本从dyna的d3plot文件中提取了大量的有限元应力数据(以后可能会分享怎么读取,有需要联系我),想在自己开发的程序界面上将应力三维云图绘制出来,面对这个数据量(几十万个点),用matplotlib的话会让程序非常卡顿,然后就有了这个专栏,Mayavi绘制这个还是挺快的,而且交互起来一点不卡。一个丰富的用户界面,可以和数据、对象进行交互。简洁清晰的Python接口,以及可以使用
基于Python的Delmia二次开发系列
基于VBA的AutoCAD二次开发