- @nullccc
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了MATLAB/Simulink中代码生成插件的安装与使用流程。主要内容包括:1)安装Simulink Coder、Embedded Coder等必要插件;2)创建单速率Simulink工程,配置模型参数与数据字典;3)演示通过Embedded Coder生成C代码的过程;4)详细说明如何使用Simulink Bus创建模块化结构体接口,包括输入/输出/配置三种总线类型的定义与子系统封装方
本文介绍了AI辅助MATLAB/Simulink开发的工具链安装与测试流程。主要内容包括:1)安装CodeX、MATLAB MCP协议和Simulink Agentic Toolkit;2)验证工具链配置正确性;3)测试工具链功能:通过CodeX解读Simulink模型、自动搭建PMSM三闭环控制系统、复现非线性磁链观测器论文。测试结果表明,该工具链能有效实现AI规划→MCP调用→MATLAB执行
摘要:本文系统阐述了电机转动方程及其扰动观测控制方法。首先建立电机二阶动力学方程Jθ̈=Ktiq-d,分析转矩、惯量与扰动的关系。重点介绍了扰动观测器(DOB)的设计原理:通过构建三阶状态空间模型(位移、速度、扰动),利用带宽参数ω0设置观测增益,实现扰动估计和前馈补偿。文中给出了离散化实现代码,包含位置误差计算、扰动观测、速度预测等关键步骤,并通过Simulink仿真验证了该方法对齿槽转矩、负载
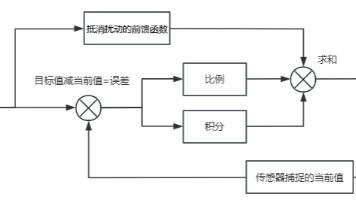
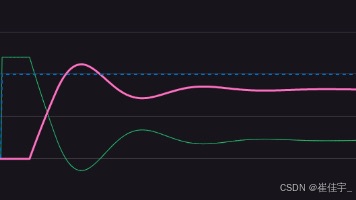
在过程控制中,PID 控制器,一直是应用最为广泛的一种自动控制器。PID 控制也一直是众多控制方法中应用最为普遍的控制算法。它不依赖复杂的数学模型,更具象和通俗一点,对于 PID 来说,之后再采集实际测量值反复循环这个过程。比如:你开车时,眼睛看路(),大脑对比车道(),手调方向盘(如果车偏左了,PID会让你往右打方向盘,直到车回到车道中央。
本文介绍了YuanHub项目中Simulink控制器模型的结构体参数体系,重点解析了电流环、位置速度环等核心控制模块的参数配置。主要内容包括: Simulink模型采用模块化设计,每个功能对应独立模型文件,包含input/config/output三个结构体接口 详细说明了电流环控制结构体(CurrentCtlConfig/Input/Output)的参数定义,包括PI增益、死区补偿等关键参数 介
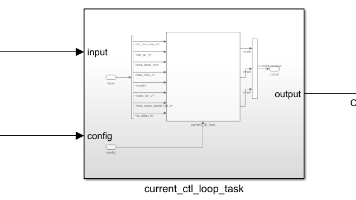
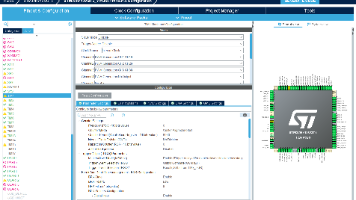
本文详细介绍了电机控制系统中电流环的实现方法,主要包括三部分内容: 定时器外设初始化与中断处理 使用TIM1定时器配置PWM输出,设置中心对齐模式减小谐波 通过注入组中断触发电流环任务,频率20kHz 采用DWT时钟计数器精确测量中断周期和执行时间 电流环控制逻辑 通过ADC采样获取三相电流值 调用Simulink模型计算控制量 设置PWM占空比输出三相电压 包含详细的输入输出结构体定义 Simu
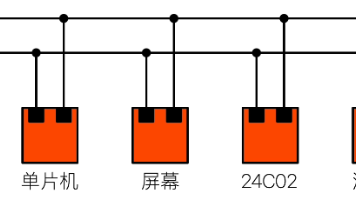
摘要:IIC(Inter-Integrated Circuit)是由Philips提出的串行通信总线标准,采用两根信号线(SCL时钟线和SDA数据线)实现主从设备间的短距离通信。其特点包括半双工通信、多主多从结构、7/10位地址寻址、支持多种速率(100kbit/s至5Mbit/s)以及硬件开销小等优点,但也存在速率较低、总线电容限制通信距离等缺点。物理层定义了电气特性和拓扑结构,数据链路层则负责
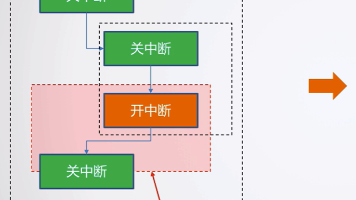
本文介绍了RTOS中的三种关键机制:临界区保护、调度锁和任务优先级管理。临界区保护通过禁用中断或使用互斥锁保护共享资源,确保数据一致性;调度锁通过计数器控制任务切换,保护关键操作;任务优先级采用位图数据结构快速检索最高优先级任务,实现高效调度。文章详细分析了每种机制的实现原理和代码示例,包括临界区嵌套保护、调度锁计数器和位图查找算法等核心技术。这些机制共同保障了RTOS的实时性和可靠性,是嵌入式系
三相电机的实际电流经过驱动器采样得到的电流,也就是电机实际流过的电流。:q 轴电流,控制。:d 轴电流,控制(对于永磁同步电机,通常控制为 0)。:控制器输入的直流电流。
本文介绍了基于Cortex-M架构实现任务切换的三种方法:1. 基本任务切换:通过保存和恢复任务堆栈及寄存器状态实现,使用PendSV中断进行上下文切换。2. 时间片轮转调度:利用SysTick定时器定期触发任务切换,实现公平的CPU时间分配。3. 空闲任务机制:在没有任务就绪时运行空闲任务,并增加了任务延时功能。文章详细阐述了任务控制块、堆栈初始化、上下文切换的汇编实现等关键机制,展示了如何通过