




- @nannan7777
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本周成功的在JetSon TX2上移植了VINS-Mono与RTAB-Map,并使用摄像头RealSense D435顺利跑通了这两个框架。中间遇到了各种各样神奇的问题,踩坑无数,现整理记录一下整体流程,便于后续查询与复现。JetSon系列是Nvidia公司推出的面向人工智能领域的嵌入式平台,这块嵌入式板子的出现使得我们可以在移动设备上处理复杂数据。

这周为了项目结题在一块崭新的TX2开发板上复现了去年的定位构图与目标检测环境部署,其实各个部分的内容在博主之前的博客中零零碎碎的都提到过,这里重新写篇博客整体总结一下,因为后面还有两块新的TX2等待博主部署环境......流下了熟练工种的泪水QAQ

年底冲KPI很多项目要结项,临时被拉去开发了一些“很有意思”的项目,感觉自从离开学校以后很长时间都没有再接触过图像处理领域了,有点跟熟悉的陌生人打交道的快感。这里简单记录一下相关代码实现,便于后续归档与复现。

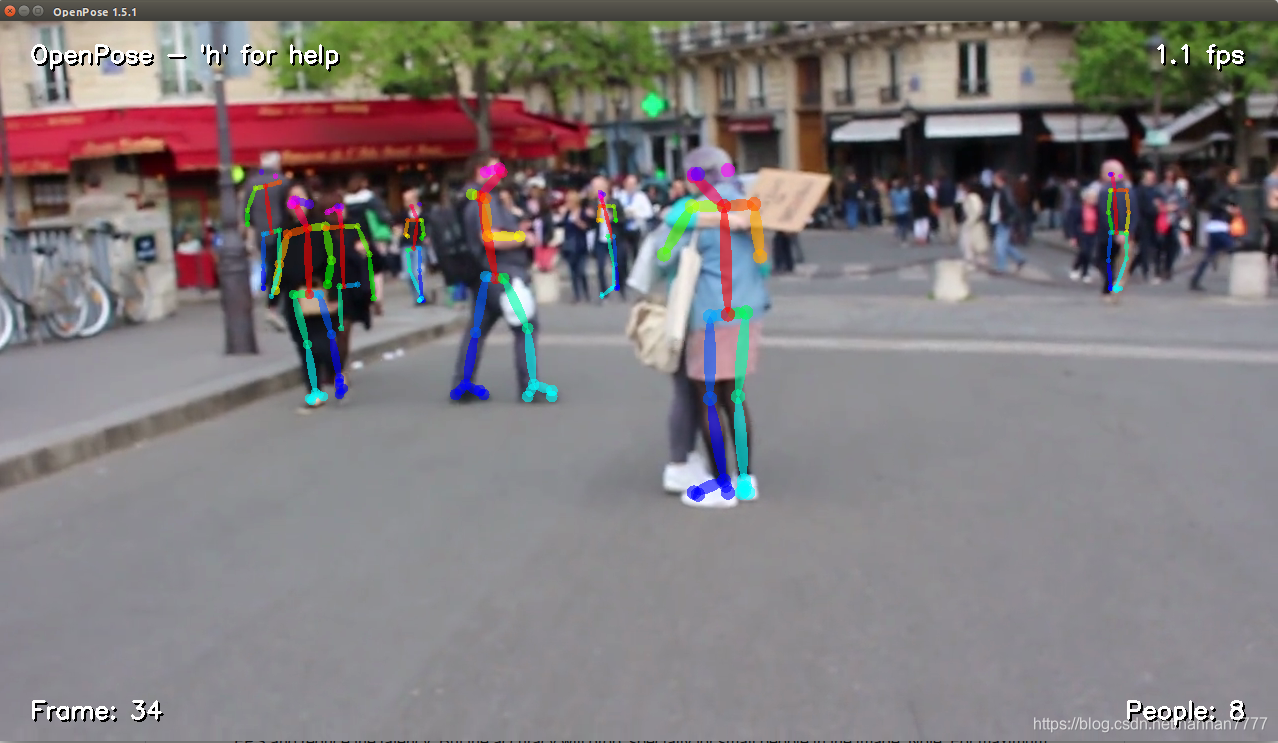
本周尝试在JetSon TX2上运行OpenPose,测试该算法对人体姿态识别的实时性能。OpenPose的编译比较简单,不过按照惯例还是记录一下所有流程,便于后续复现。Github源码链接:[https://github.com/CMU-Perceptual-Computing-Lab/openpose](https://github.com/CMU-Perceptual-Computing-L
这周为了项目结题在一块崭新的TX2开发板上复现了去年的定位构图与目标检测环境部署,其实各个部分的内容在博主之前的博客中零零碎碎的都提到过,这里重新写篇博客整体总结一下,因为后面还有两块新的TX2等待博主部署环境......流下了熟练工种的泪水QAQ
近期在补卫星仿真领域的相关基础知识,并总结一些卫星轨道计算的算法与工具类代码函数。参考内容见百度公开文库文档与PPT

本周成功的在JetSon TX2上移植了VINS-Mono与RTAB-Map,并使用摄像头RealSense D435顺利跑通了这两个框架。中间遇到了各种各样神奇的问题,踩坑无数,现整理记录一下整体流程,便于后续查询与复现。JetSon系列是Nvidia公司推出的面向人工智能领域的嵌入式平台,这块嵌入式板子的出现使得我们可以在移动设备上处理复杂数据。
之前项目中一直使用的是RESTful服务形式,逐渐无法满足业务使用需求,于是探索WebSocket这种实时通信方式,整理总结一下完整的功能函数,便于后续归档与复现。

之前项目中一直使用的是RESTful服务形式,逐渐无法满足业务使用需求,于是探索WebSocket这种实时通信方式,整理总结一下完整的功能函数,便于后续归档与复现。
本文记录并整理了学习XXL-JOB框架的全部过程,要求对XXL-JOB掌握基础的使用方法和基础原理,可以先参考博主之前的XXL-JOB搭建笔记博客。
