- @mzpmzk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一、步入linux1. linux 简要介绍linux 的基本思想:一切皆文件linux 的特点:多用户、多任务、多平台2. linux 发行版概念:linux的本质只是操作系统的核心,人们以linux核心为中心再集成各种各样的系统管理软件或应用工具组成一套完整的操作系统,便成为linux发行版常见linux发行版:redhat(企业级收费)、centos(企业级免费–基于rehat重构)
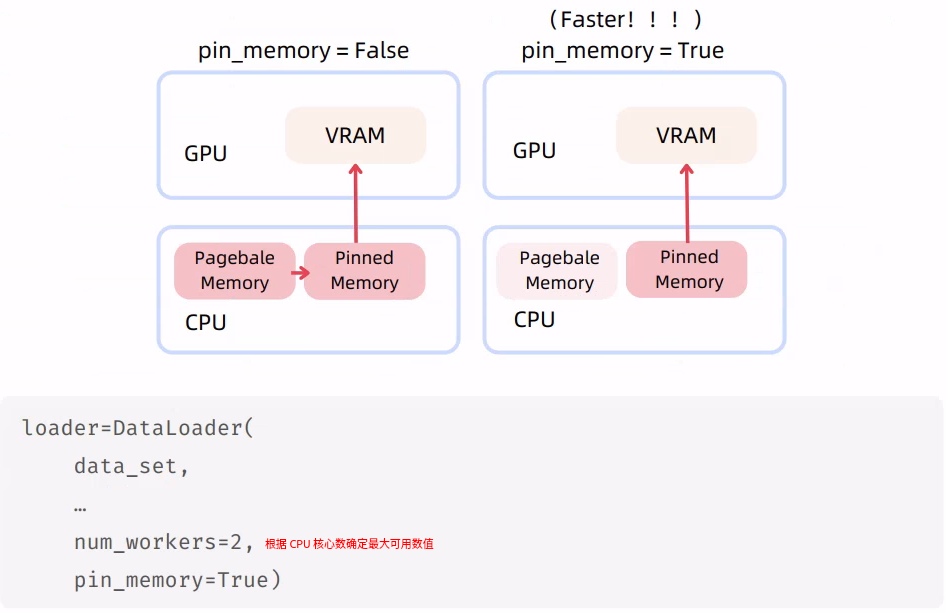
例如下面的代码, 其中张量最初在 CPU 内存中创建 , 然后被移动到 GPU 显存。不同, 它能避免不必要的数据拷贝, 将数据转换为张量, 并在可能的情况下共享底层数据和保留。函数在 GPU 和 CPU 之间传输数据。通过直接在 GPU 上创建张量, 可以。:可跨多个 GPU 或机器实现分布式训练, 从而显著地提高计算能力并缩短训练时间。该方法在处理深度学习任务中涉及大量GPU操作时特别有效。”
一、什么是计算机视觉?1. 计算机视觉的定义计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是指用摄影机和计算机代替人眼对目标进行识别、跟踪和测量等机器视觉的应用。主要用于模拟人类视觉的优越能力和弥补人类视觉的缺陷。模拟人类视觉的优越能力:识别人、物体、场景估计立体空间、距离躲避障碍物进行导航想象并描述故事理解并讲解图...
一、简介MS-COCO数据集是微软构建的一个数据集,其包含 detection, segmentation, keypoints 等任务与 PASCAL VOC 数据集相比:COCO 中的图片包含了自然图片以及生活中常见的目标图片,背景比较复杂,目标数量比较多,目标尺寸更小,因此 COCO 数据集上的任务更难COCO 数据集平均每张图片包含 3.5 个类别和 7.7 个实例目标,仅有不到 20%
转 LMDB 代码示例。
例如下面的代码, 其中张量最初在 CPU 内存中创建 , 然后被移动到 GPU 显存。不同, 它能避免不必要的数据拷贝, 将数据转换为张量, 并在可能的情况下共享底层数据和保留。函数在 GPU 和 CPU 之间传输数据。通过直接在 GPU 上创建张量, 可以。:可跨多个 GPU 或机器实现分布式训练, 从而显著地提高计算能力并缩短训练时间。该方法在处理深度学习任务中涉及大量GPU操作时特别有效。”
文章目录一、简介二、数据增强整体流程三、像素内容变换(Photometric Distortions)1、Random Brightness2、Random Contrast, Hue, Saturation3、RandomLightingNoise四、空间几何变换(Geometric Distortions)1、RandomExpand2、RandomCrop3、RandomMirror五、py
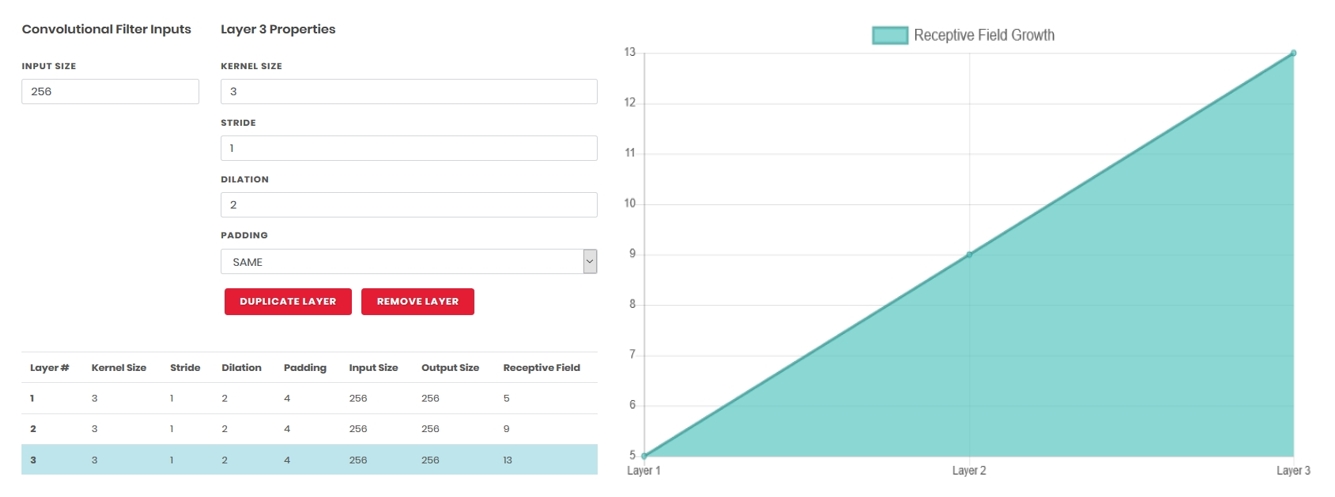
一、理论感受野1、定义感受野被定义为卷积神经网络特征所能看到输入图像的区域,换句话说特征输出受感受野区域内的像素点的影响convNets(cnn)每一层输出的特征图(feature map)上的像素点在原始图像上映射的区域大小。神经元感受野的值越大表示其能接触到的原始图像范围就越大,也意味着他可能蕴含更为全局、语义层次更高的特征;而值越小则表示其所包含的特征越趋向于局部和细节。因此感受野...
转 LMDB 代码示例。
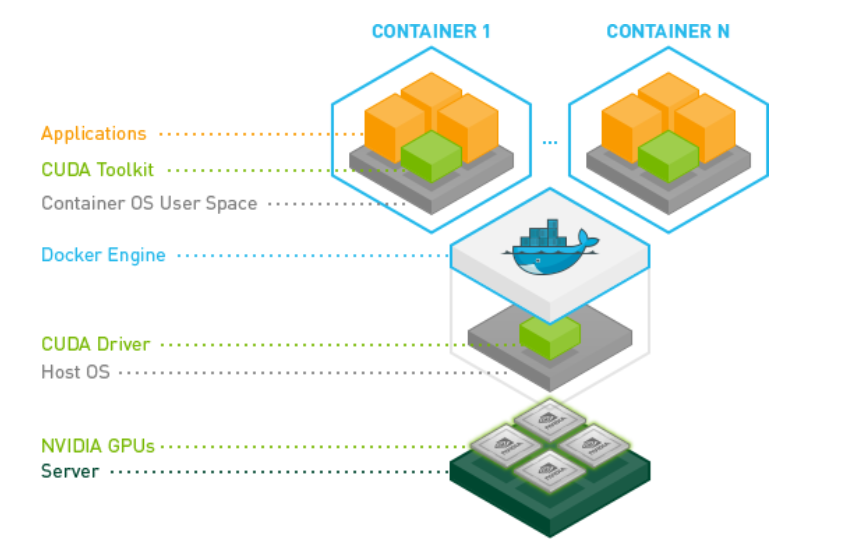
ubuntu16.04 docker 和 nvidia-docker 的安装及 GPU 的调用