- @mqjFKmYf
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
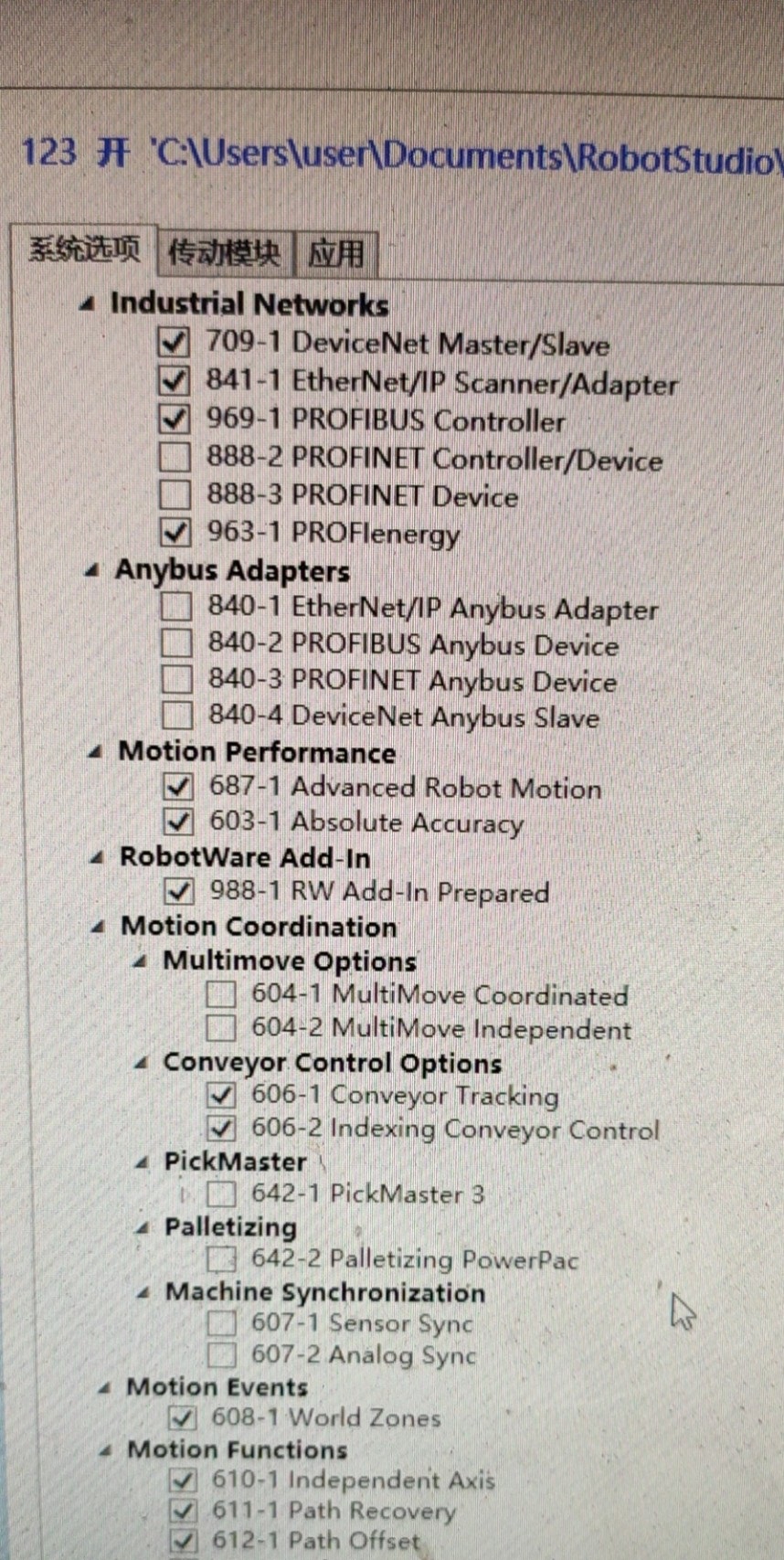
重点来了,系统时间必须和密钥有效期匹配,我上次就栽在这儿,机器时间调回2018年才读出来,你懂的。搞过工业机器人的兄弟应该都懂,ABB的选项包就跟游戏里的DLC似的,没解锁的话高级功能全灰。今天咱们唠点硬核的,手把手教你三种激活大法——物理密钥、虚拟机巧、还有直接写密钥的骚操作。ABB机器人选项包,密钥,三种方法,真实、虚拟、密钥三种方法,有教程、有软件、也有密钥。ABB机器人选项包,密钥,三种方
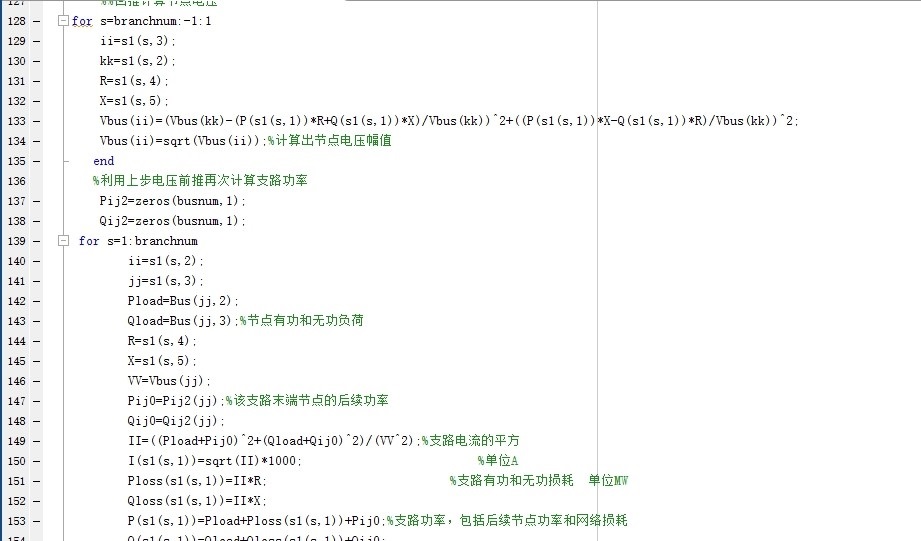
IEEE33节点配电网Simulink模型,附带有详细节点数据以及文献出处来源,MATLAB,simulink各个版本均可运行,可以进行潮流计算以及四种常见故障波形仿真,可以更换线路模型,分布参数模型用于故障仿真(50km线路阻抗数据已经计算完毕,帮助节约大量时间更换模型),集中参数模型用于潮流计算。不过节点导纳矩阵的生成逻辑有点特别——它是按线路实际连接关系动态构建的,和传统按节点编号顺序生成的
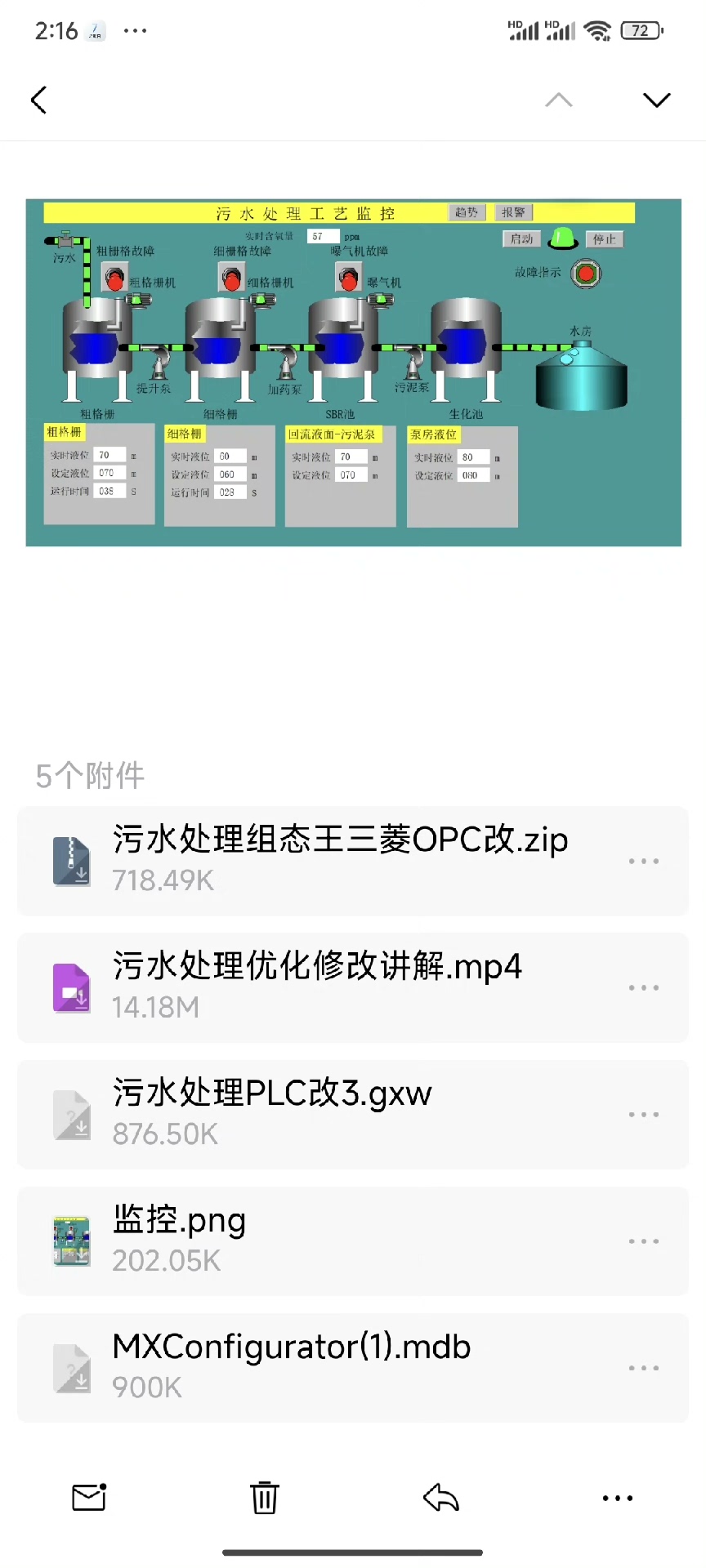
污水处理组态王6.55和三菱PLC联机仿真OPC通讯优化程序99,带注释改,仿真操作步骤讲解视频在污水处理项目里,让组态王6.55与三菱PLC通过OPC进行联机仿真通讯,就像搭建了一座数据桥梁,让不同系统间能流畅对话。今天咱就聊聊怎么优化这个程序,编号99的这个,还带注释版本的哦,再顺带讲讲仿真操作步骤,配上讲解视频那就更绝了。
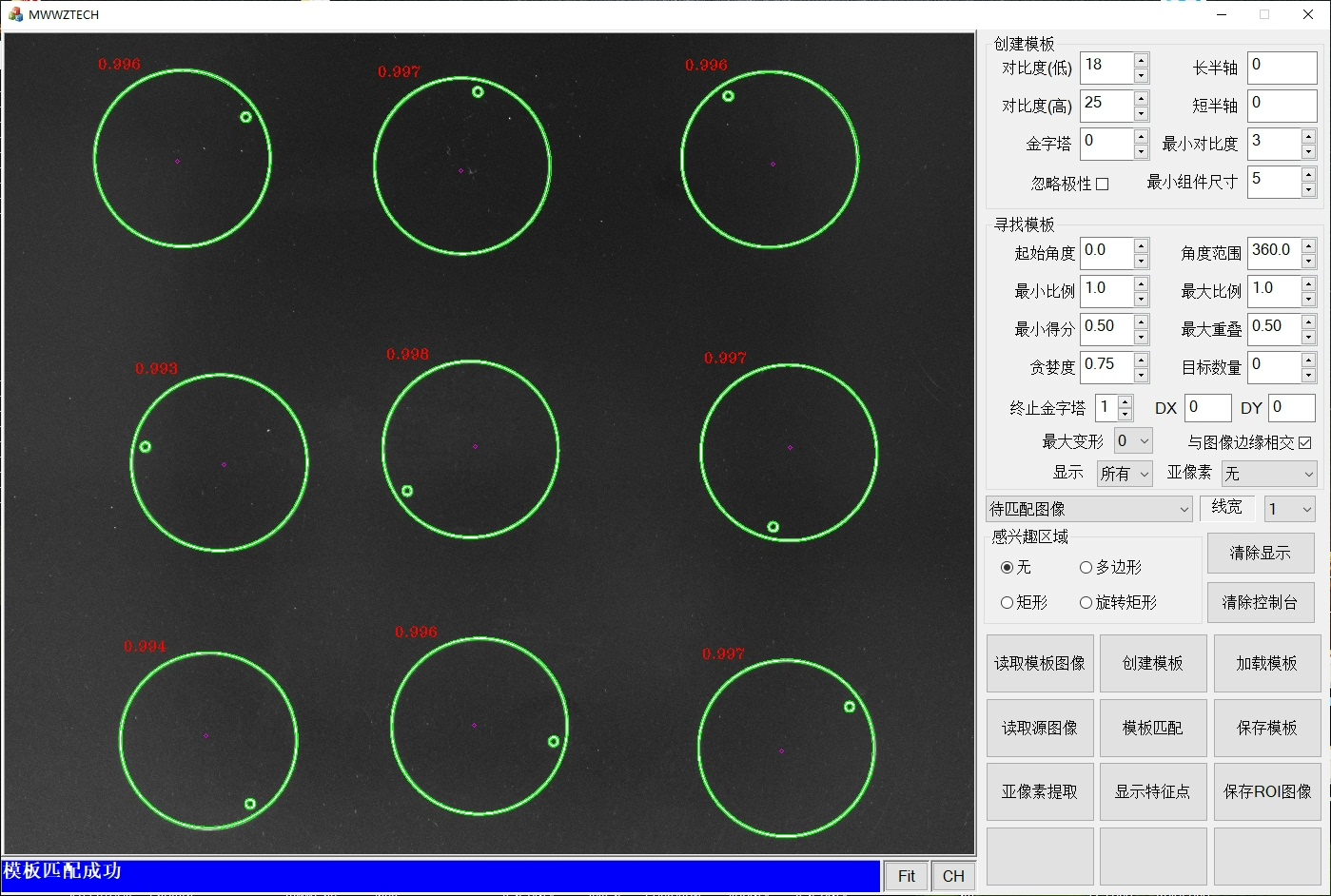
最后来个冷知识:用C++的OpenCV处理200ms每帧,换成C#+EmguCV可能变成300ms。不是语言问题,而是托管代码的GC在作妖,实时系统记得用Native代码+内存池优化。模板匹配像是精准的狙击枪,特征匹配像霰弹枪——没有绝对的好坏,关键看场景。下次在便利店看到自动识别Logo的机器,说不定里面正跑着类似的代码逻辑呢。Logo识别,模式识别,特殊形状识别,模板匹配,C++/C#,ope
话说回来,他们的深度学习模块训练出来的模型,部署时要注意输入图像的归一化方式,有个学员用OpenCV做预处理结果不准,后来发现海康的归一化是除以255再减0.5,和常规做法不一样。整套资料里最值钱的是那套通讯故障排查手册,像三菱PLC的FX5U偶尔会报"无法建立连接",手册里写着要改GX Works3里的以太网模块参数,把TCP保持连接时间从默认120秒改成0(无限)。所以算法优化真不一定是代码层

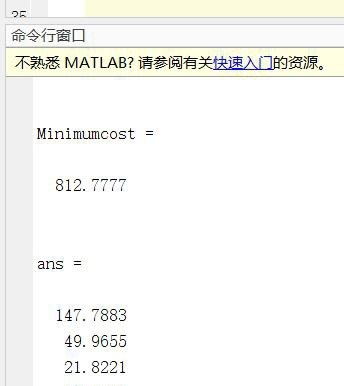
本方案实现了一个基于遗传算法(Genetic Algorithm)的电力系统最优潮流(Optimal Power Flow, OPF)求解系统。该系统以IEEE 30节点输电网为研究对象,以系统发电成本最小化为目标函数,通过优化机组出力来实现电力系统的经济运行。
说真的,这套框架的价值不在于用了多牛逼的技术,而是把工业控制的常见套路都标准化了。这个框架最让我服气的是报警处理的设计。上次车间电网波动,别的设备都瘫了,用这个框架的设备自己完成了总线重连,生产主管看我的眼神都带着光。把汇川的轴控制块换成三菱的MC指令,基本就是改改函数名的功夫。触摸屏交互这块更有意思。主打的伺服控制是总线程序写的条理分明,清晰易懂,注释清楚,对于初次使用汇川的总线控制有很好的参考
1、数据集:钢材缺陷数据集包含6个类别:"crazing","inclusion","patches","pitted_surface","rolled-in_scale","scratches"对应钢材表面夹杂、划痕、压入氧化皮、裂纹、麻点和斑块6种缺陷。这些新版本的模型能够更准确地识别细微的缺陷,并且对复杂背景下的缺陷检测有更好的鲁棒性。本文所使用的钢材缺陷数据集包含了6个类别的缺陷图像:"c
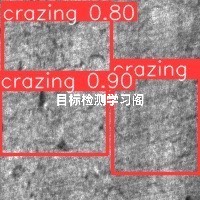
YOLOv5 是一种目标检测算法,它速度快且精度较高,在各种实际场景中都有广泛应用。PyTorch 则是一个基于Python的科学计算包,专为深度学习而设计,其动态计算图的特性使得模型的开发和调试更加灵活和直观。

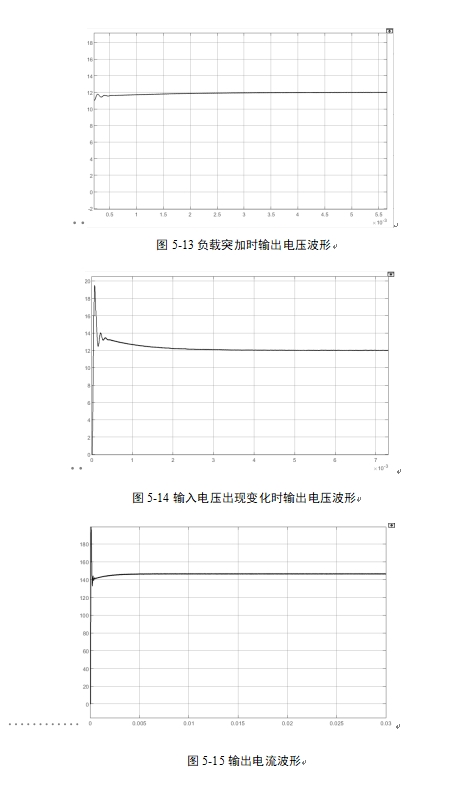
最近在折腾快充电源项目发现个有意思的现象——LLC谐振变换器这玩意儿就像个会变魔术的电工,能在不同负载下自动切换工作模式。今天咱们就拿MATLAB 2018b开刀,手把手造个能抗400V输入/48V输出的半桥LLC变换器,从参数计算到闭环控制一锅端。注意这里的电感比k值是个玄学参数,取值3~6之间比较稳妥,调大了容易进入容性区翻车。搞完这套流程,你的LLC仿真基本能扛住老板的灵魂拷问了,实测和仿真