
写文章




- @m0_73885374
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
在ROS2中通过Mavros读取、打印并可视化飞控IMU数据
在运行ROS2的树莓派4B中通过Mavros读取并打印pixhawk/ardupilot的IMU数据

掌握无人机自主起飞:深入解析ROS2节点实现(Ardupilot+ROS2+Gazebo+Mavros仿真)
Ardupilot+ROS2+Gazebo+Mavros仿真控制无人机起飞的Python节点详解

Ardupilot+ROS2+gazebo+mavros仿真之读取无人机状态并尝试解锁
拥有一个安装了ROS2 Humble的ubuntu 22.04虚拟机;处在一个良好的网络环境(能访问Github)
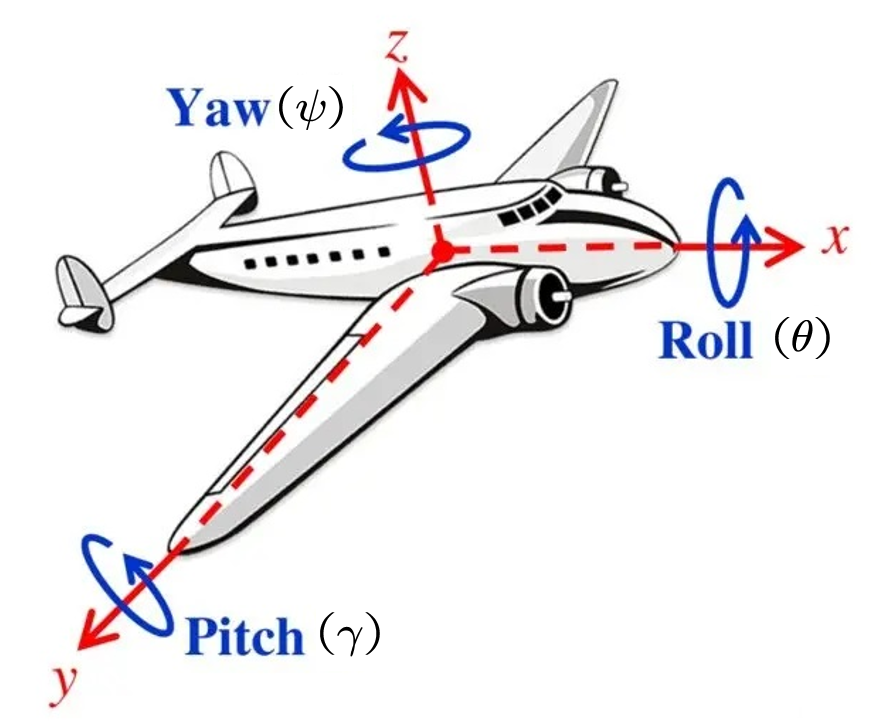
MPU6050实现Mahony互补滤波(程序使用江协科技模板)
STM32最小系统板+MPU6050使用Mahony互补滤波进行姿态解算,获取稳定准确的欧拉角,附源码,程序使用江协科技风格,规范易懂。
到底了