




- @m0_71627844
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
官方预热显示,大象机器人发布的新品是一种新形态,也是双臂人形机器人新超越。目前,大象机器人官方尚未透露即将发布新品的更多信息,不过,大象官方新品发布主题为“双臂人形机器人新边界”,预计本次将发布的新品为面向高校人工智能机器人应用解决方案,感兴趣的朋友到时可以关注官方的新品发布信息。...

接下来在计算手部,肘部,肩部三个关键点形成的角度,这个角度涉及更复杂的姿势分析,因为它包括了从手部到膝部再到肩部的整个链条,结合这两种角度的计算,可以让机械臂模仿人体姿势更加精准和自然。在项目中需要获取人手比的手腕,肘部和肩部的x,y坐标来进行计算角度,然后将相同的角度发送到mycobot的第二第三关节。然后计算腰部到肩部之间的角度,这个角度主要关注的是上半身的一个简化模型,可能用于模拟肩部的运动

这一次,我使用 Isaac Gym 创建了一个强化学习任务,并实际训练了模型。我在 3D 物理模拟器中体验了机器人强化学习问题的设计以及运行训练模型时出现的问题。能够测试学习环境而不必从头开始编写强化学习算法很有吸引力。基准环境的可用性使得比较和验证新的学习算法变得容易,这对于具有各种专业背景的研究人员和分析师来说是一个很大的优势。
这一次,我使用 Isaac Gym 创建了一个强化学习任务,并实际训练了模型。我在 3D 物理模拟器中体验了机器人强化学习问题的设计以及运行训练模型时出现的问题。能够测试学习环境而不必从头开始编写强化学习算法很有吸引力。基准环境的可用性使得比较和验证新的学习算法变得容易,这对于具有各种专业背景的研究人员和分析师来说是一个很大的优势。
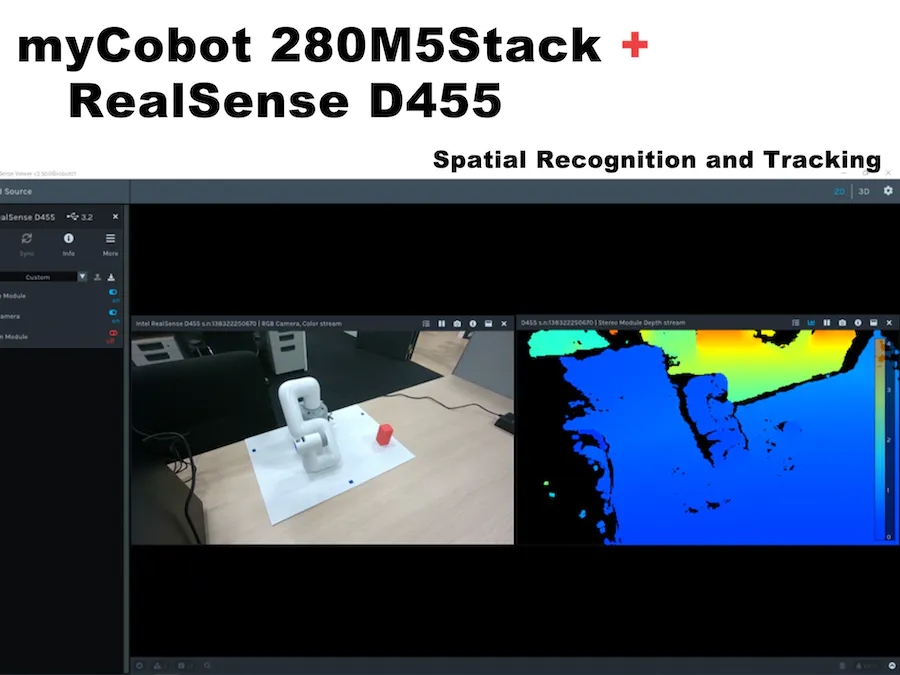
在myStudio 3.1.3中,将出现如图3和图4所示的屏幕,然后下载最新版本的Minirobot for Basic和AtomMain for ATOM,选择Flash,然后写入固件。应该以相同的方式处理,但 RGB 也以相同的方式表示。默认情况下,点云大小设置为 0.01 m,这是一个很大的值,因此点云相互重叠显示,但如果将其设置为 0.001 m 左右,您可以看到点云的获取非常精细。当然,
总的来说,myCobot 280 2023是一款具有多种新功能和改进的机械臂,大大增强了其性能和应用范围。除了提升通信速度、支持 ROS2、避免自干扰碰撞外,我们还推出了AIKit 2023,将机器视觉与机械臂相结合,实现类似工业的自动化场景,让机械臂的应用更加广泛和多样化。此外,myCobot 280 2023 还有许多其他功能等着你去探索,比如绘图、AI分拣抓取等,这将进一步拓展机械臂的应用范
myArm内置接口可以进行超高难度的肘关节姿态变换,在实践教学中,可以用于机器人姿态研究、机器人运动路径规划学习、机器人冗余自由度的管理和利用、正逆运动学、ROS机器人开发环境、机器人应用开发、编程语言开发和底层数据处理等多种机器人相关的学科教育。结合机器学习和先进的图像处理技术,使用ArUco标记的机械臂系统可以实现更高级的自动化功能,如精确定位、导航和复杂动作的执行。总而言之,该项目可以实践应
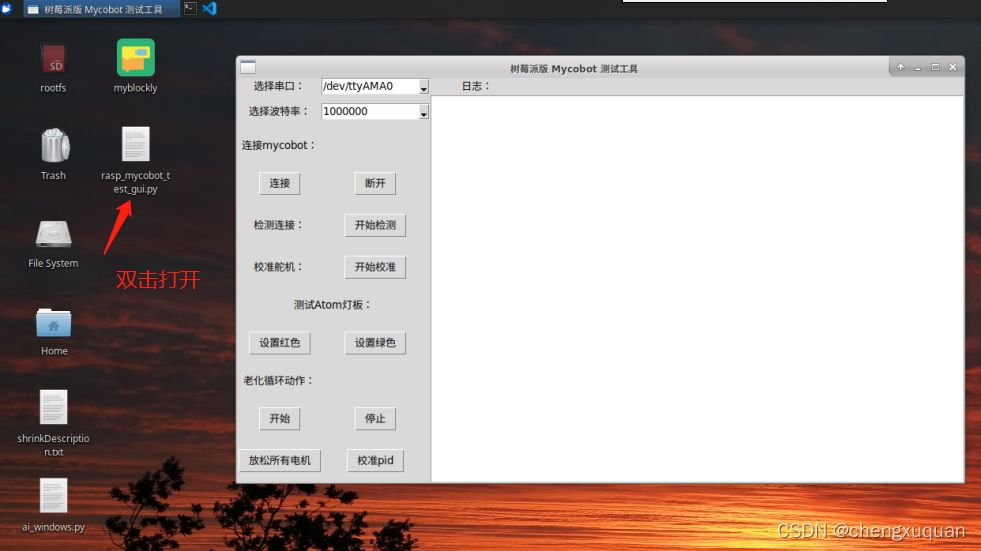
上一讲我们做ssh和vnc的设置,有小伙伴问设置些有什么用,那么这里我先来解释一下这些功能有什么用处,首先我们可以通过ssh在我们的Windows桌面进行程序开发,然后上传到树莓派进行验证,我们也可以在windows平台通过vnc远程操作我们的机械臂,这样你就可以在自己的工作台上自由编程和上网查资料,然后MyCobot他不会占用你的显示器。当然了,你也可以直接拿这个树莓派当做开发机器使用,也是没有
这目前已经可以满足大部分的需求了,实际的使用情况下来来看,整个的功能还是比较完整的,能够有效的识别出语音内容,特别是让我说数字的时候他主动转化成阿拉伯数字,在进行交互的过程中省了处理数字的问题。当我们收到,多行的指令就不能跟之前单纯的分离来进行处理了得考虑其他的方式,以下的情况默认ChatGPT生成的指令是下面这种换行行的字符串,没有带注释的(ChatGPT很喜欢写注释)。这样就完成了,能够处理单
官方预热显示,大象机器人发布的新品是一种新形态,也是双臂人形机器人新超越。目前,大象机器人官方尚未透露即将发布新品的更多信息,不过,大象官方新品发布主题为“双臂人形机器人新边界”,预计本次将发布的新品为面向高校人工智能机器人应用解决方案,感兴趣的朋友到时可以关注官方的新品发布信息。...