
写文章




- @m0_65551120
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
(水下)目标检测/深度学习/计算机视觉国内外知名课题组
北京大学智能机器人开放实验室(Open Lab on Human Robot Interaction,Peking University,简称PKU-HRI),以机器人视觉感知与自主学习技术为核心,在环境的视觉感知、物体的视觉感知、人体的视觉感知和机器人本体的视觉感知等领域,开展长期、系统、深入的研究。同时,在智能机器人的视觉感知与决策方面也有深入的研究,致力于提高机器人的自主感知和决策能力。:在

学习了解多模态的水下目标检测
旨在通过跨模态信息互补解决水下伪装目标跟踪的挑战,为视觉-语言联合建模提供了首个大规模基准。该数据集由220个水下视频序列组成,跨越96个类别,约159,000帧,是首个大规模多模态水下目标跟踪数据集。(如光学图像、声呐、激光雷达、深度信息、热成像等),综合利用不同模态的互补优势,提升水下复杂环境下的目标检测性能。——通过多模态数据打破单一传感器的局限性,解决水下环境的光学退化、遮挡、低对比度等问
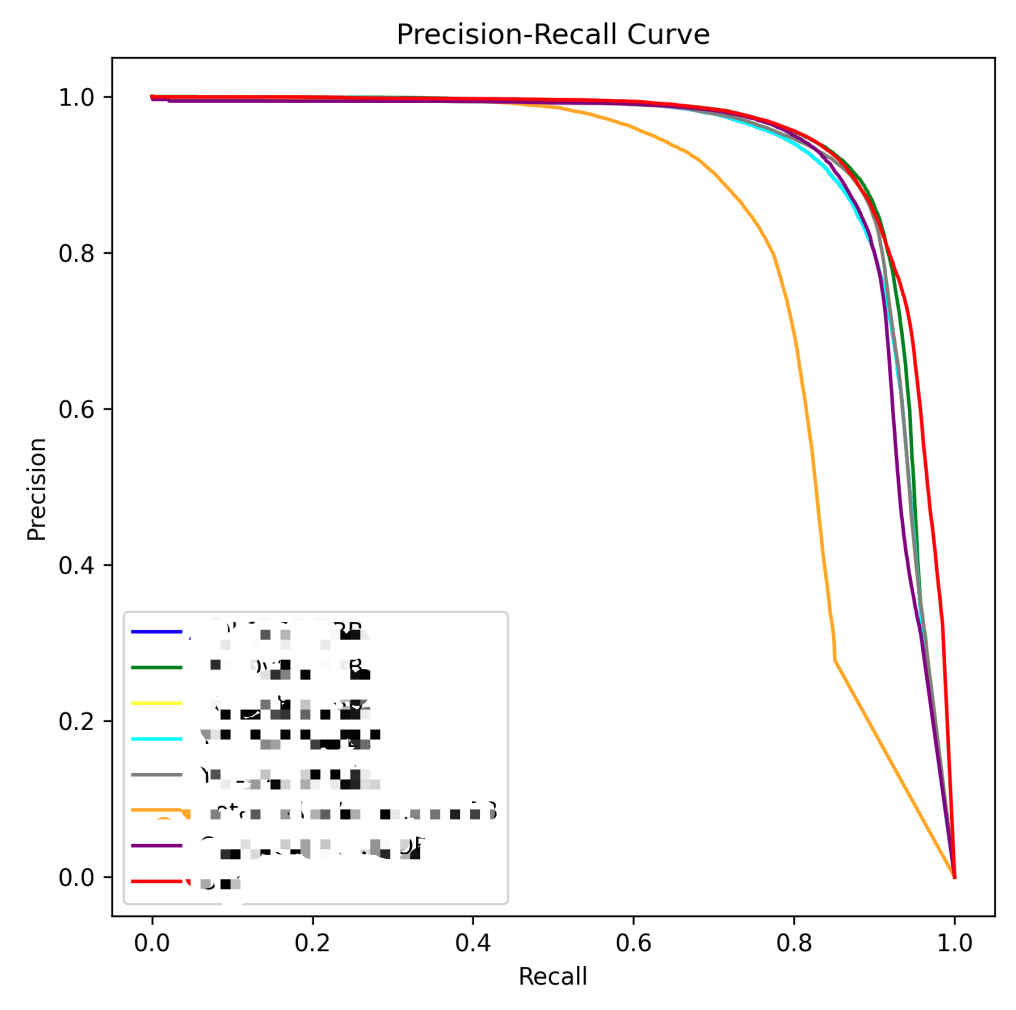
如何绘制多个模型的P-R曲线和Map曲线在一张图上【附源码】
得到的结果如下图。
到底了