




- @m0_64386340
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
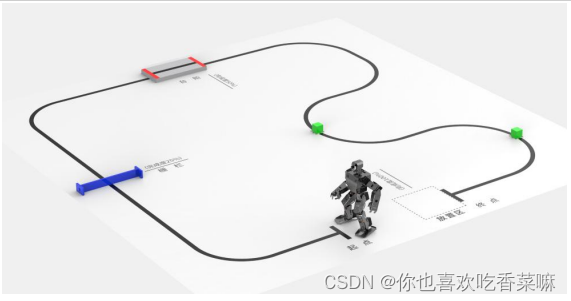
1、机器人面向起跑线后,裁判发令计时开始,启动机器人;2、每支队伍有且仅有一次上场机会,完成比赛时间越短,完成度越高,得 分越高;3、自主跨栏:机器人通过视觉识别栅栏,完成自主跨栏任务,跨栏过程机 器人摔倒无法自动起立、出界或无法跨越栅栏,可以向裁判请求跳过项目 或者扶正机器人,并按照规则扣分,共 3 次机会,过程中计时继续;
从STM32接收到的数据中提取我们所需的数据,极大的便利了串口控制的流程。如:从“Z轴移动10mm”中,将10提取出来,并赋值给其他变量。

1、机器人面向起跑线后,裁判发令计时开始,启动机器人;2、每支队伍有且仅有一次上场机会,完成比赛时间越短,完成度越高,得 分越高;3、自主跨栏:机器人通过视觉识别栅栏,完成自主跨栏任务,跨栏过程机 器人摔倒无法自动起立、出界或无法跨越栅栏,可以向裁判请求跳过项目 或者扶正机器人,并按照规则扣分,共 3 次机会,过程中计时继续;
1、机器人面向起跑线后,裁判发令计时开始,启动机器人;2、每支队伍有且仅有一次上场机会,完成比赛时间越短,完成度越高,得 分越高;3、自主跨栏:机器人通过视觉识别栅栏,完成自主跨栏任务,跨栏过程机 器人摔倒无法自动起立、出界或无法跨越栅栏,可以向裁判请求跳过项目 或者扶正机器人,并按照规则扣分,共 3 次机会,过程中计时继续;

这里我们只读取角度数据,不使用弱磁报警和奇偶校验位、超速报警。
当Compare = 50时,改PWM的占空比为50 / (100 - 1 + 1)=50%PWM的频率 = 时钟频率 / (自动重装值 + 1)*(预分频值 + 1)STM32的最大时钟频率为72MHz = 72 000 000 Hz。占空比 = CCR / (ARR + 1)