




- @m0_64110343
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
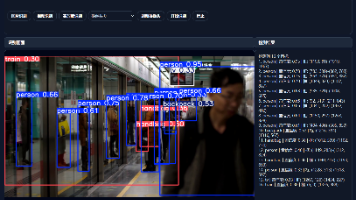
本文介绍了一个基于YOLOv8的目标检测管理系统,采用PySide6构建图形界面,支持图片、视频、摄像头和实时流识别。系统通过多线程设计实现流畅检测,避免界面卡顿,并实时显示检测画面和结果。主要功能包括:自动扫描可用摄像头、多种识别源切换、检测结果可视化展示等。该系统操作简便、界面美观,可作为计算机视觉应用的开发基础,后续可扩展模型管理、结果保存等功能。
OSI 七层模型(理论)应用层,表示层,会话层,传输层,网络层,数据链路层,物理层TCP/IP 五层模型(实际在用)应用层,传输层,网络层,数据链路层,物理层数据链路层:ARP 把IP 地址转换成对应的MAC 物理地址网络层:IP 分配主机地址(A 类私有B 类私有C 类私有(最常用)传输层:TCP、UDPHTTP/HTTPS网页访问、FTP/SFTP文件传输、DNS域名解析、SSH远程登录 Li
本文介绍了在RTX4090显卡(CUDA11.8)环境下配置RT-DETR目标检测模型的完整流程。首先基于Miniconda创建Python3.10的纯净环境,然后分步骤安装PyTorch2.1.2、NumPy和OpenCV等核心依赖项,特别注意版本兼容性问题。针对VisDrone数据集,提供了详细的格式转换脚本,将原始标注转换为YOLO格式,并给出数据集目录结构的配置方法。最后通过修改visdr
一个简单的毕业设计

本文介绍了在RTX4090显卡(CUDA11.8)环境下配置RT-DETR目标检测模型的完整流程。首先基于Miniconda创建Python3.10的纯净环境,然后分步骤安装PyTorch2.1.2、NumPy和OpenCV等核心依赖项,特别注意版本兼容性问题。针对VisDrone数据集,提供了详细的格式转换脚本,将原始标注转换为YOLO格式,并给出数据集目录结构的配置方法。最后通过修改visdr
本文介绍了在RTX4090显卡(CUDA11.8)环境下配置RT-DETR目标检测模型的完整流程。首先基于Miniconda创建Python3.10的纯净环境,然后分步骤安装PyTorch2.1.2、NumPy和OpenCV等核心依赖项,特别注意版本兼容性问题。针对VisDrone数据集,提供了详细的格式转换脚本,将原始标注转换为YOLO格式,并给出数据集目录结构的配置方法。最后通过修改visdr
一个简单的毕业设计
一个简单的毕业设计