
写文章




- @m0_63902994
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
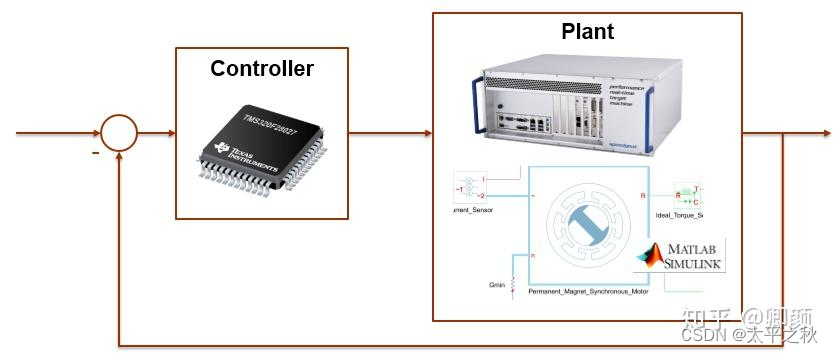
HIL 测试
即硬件在环测试(Hardware-in-the-Loop Testing),是一种广泛应用于汽车电子控制系统领域的测试方法。它将实际的硬件(如ECU、传感器、执行器等)与模拟器件(如模型、仿真器等)通过接口连接起来,模拟实际的操作环境,通过对实时运行的系统进行测试和评估,以确保汽车电子控制系统的性能和稳定性。
自动驾驶学习3-摄像头(1)
对于主流的新能源车企来说,120W到200W的镜头已经不再满足使用,行业开始升级到800W像素,比如说蔚来、理想。目前具备800W像素摄像头模组生产能力的厂商还比较少,比如说舜宇、联创电子等。

自动驾驶#芯片-1
汽车是芯片应用场景之一,汽车芯片需要具备车规级。 车规级芯片对加工工艺要求不高,但对质量要求高。需要经过的认证过程,包括质量管理标准ISO/TS 16949、可靠性标准 AEC-Q100、功能安全标准ISO26262等。 汽车内不同用途的芯片要求也不同,美国制定的汽车电子标准把其分为5级。汽车各系统对芯片要求由高到低依次是:动力安 全系统 > 车身控制系统 > 行驶控制系统 > 通信系统 >
如何使用wireshark分析报文
Wireshark的专家信息是非常强大的一个分析模块,分别对错误、警告、注意、聊天等数据信息做出分类和注释,对网络故障分析提供了强有力的信息依据,让你准确快速地判断出故障点,并进行下一步处理。当选择列表选中“错误”,专家信息窗口就只显示错误数据信息,可以清晰地看到错误数据包的概述摘要,分组,协议类型和包的数量等各类型的注释。同样,在选择“警告”会单独显示其数据信息,左边的数字是数据包的序列号,协议
到底了